The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |

| 2022-08-11 04:04:36 -0500 | received badge | ● Favorite Question (source) |
| 2022-01-11 18:34:42 -0500 | received badge | ● Nice Answer (source) |
| 2021-09-03 08:21:34 -0500 | received badge | ● Notable Question (source) |
| 2021-09-03 08:21:34 -0500 | received badge | ● Popular Question (source) |
| 2021-07-28 01:21:40 -0500 | received badge | ● Necromancer (source) |
| 2018-06-25 11:49:48 -0500 | marked best answer | hector_exploration_controller publishs twist really slowly I also find similar problems here.
So , please give me some advice. Thanks first! |
| 2018-02-04 22:28:40 -0500 | received badge | ● Famous Question (source) |
| 2018-02-04 22:28:40 -0500 | received badge | ● Notable Question (source) |
| 2018-02-04 22:28:40 -0500 | received badge | ● Popular Question (source) |
| 2017-08-11 04:15:21 -0500 | received badge | ● Famous Question (source) |
| 2017-04-30 03:03:25 -0500 | marked best answer | QPainter::begin: Paint device returned engine == 0, type: 3 When I want to run I search some infomation in Internet but I haven't find a useful one. Could you help me ?
|
| 2017-03-31 14:23:10 -0500 | received badge | ● Famous Question (source) |
| 2017-03-31 10:06:28 -0500 | received badge | ● Famous Question (source) |
| 2017-03-29 17:39:31 -0500 | marked best answer | detect qrcode with zbar_ros I could use zbar_ros with a webcamera to detect QRcode successfully.
But when I change the camera ,and add I can't start zbar_ros successfully. The detail indormation is here. |
| 2017-02-23 13:41:10 -0500 | received badge | ● Famous Question (source) |
| 2017-02-17 04:06:15 -0500 | asked a question | publish or subscribe depth image with python cv2 Hello everyone! I don not know how to publish or subscribe depth image with cv2 module. For example, if I want to publish depth image, I load a
But when I use rqt_image_view to check the published image, it cannot show the image and occurs warns
I add And when I want to subscribe the depth image with python, which type should I set in
Thanks first! |
| 2017-02-09 19:10:06 -0500 | received badge | ● Famous Question (source) |
| 2017-02-09 19:02:15 -0500 | received badge | ● Popular Question (source) |
| 2017-02-09 19:02:15 -0500 | received badge | ● Notable Question (source) |
| 2017-01-03 06:31:13 -0500 | commented question | how to use frontier_exploration with my robot??? please add more useful information such as the node graph , message graph and so on. |
| 2016-12-29 03:03:56 -0500 | received badge | ● Notable Question (source) |
| 2016-12-27 07:13:28 -0500 | received badge | ● Popular Question (source) |
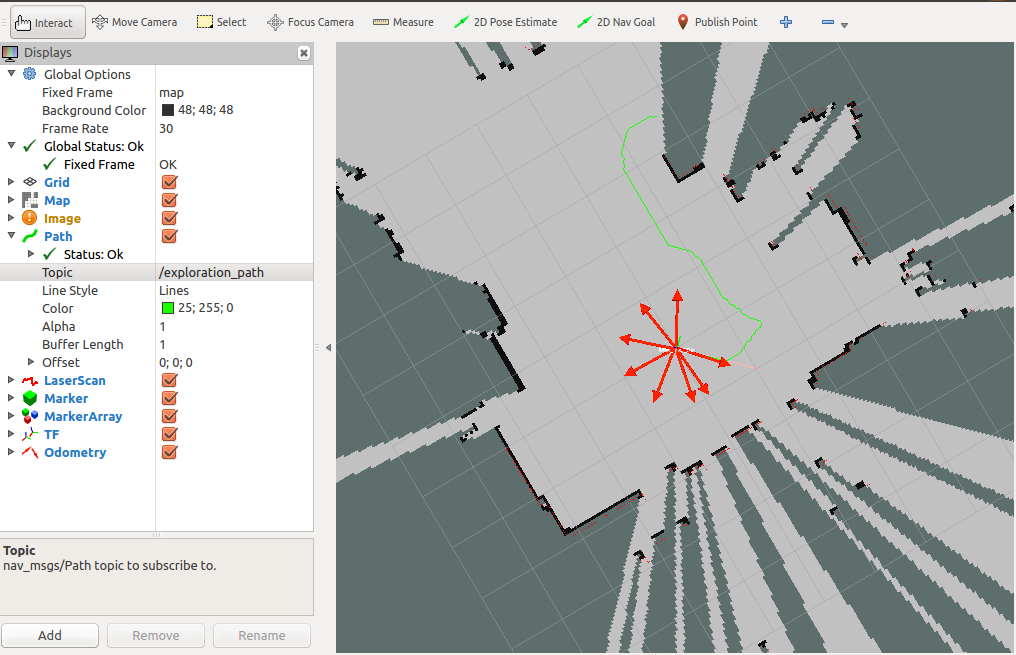
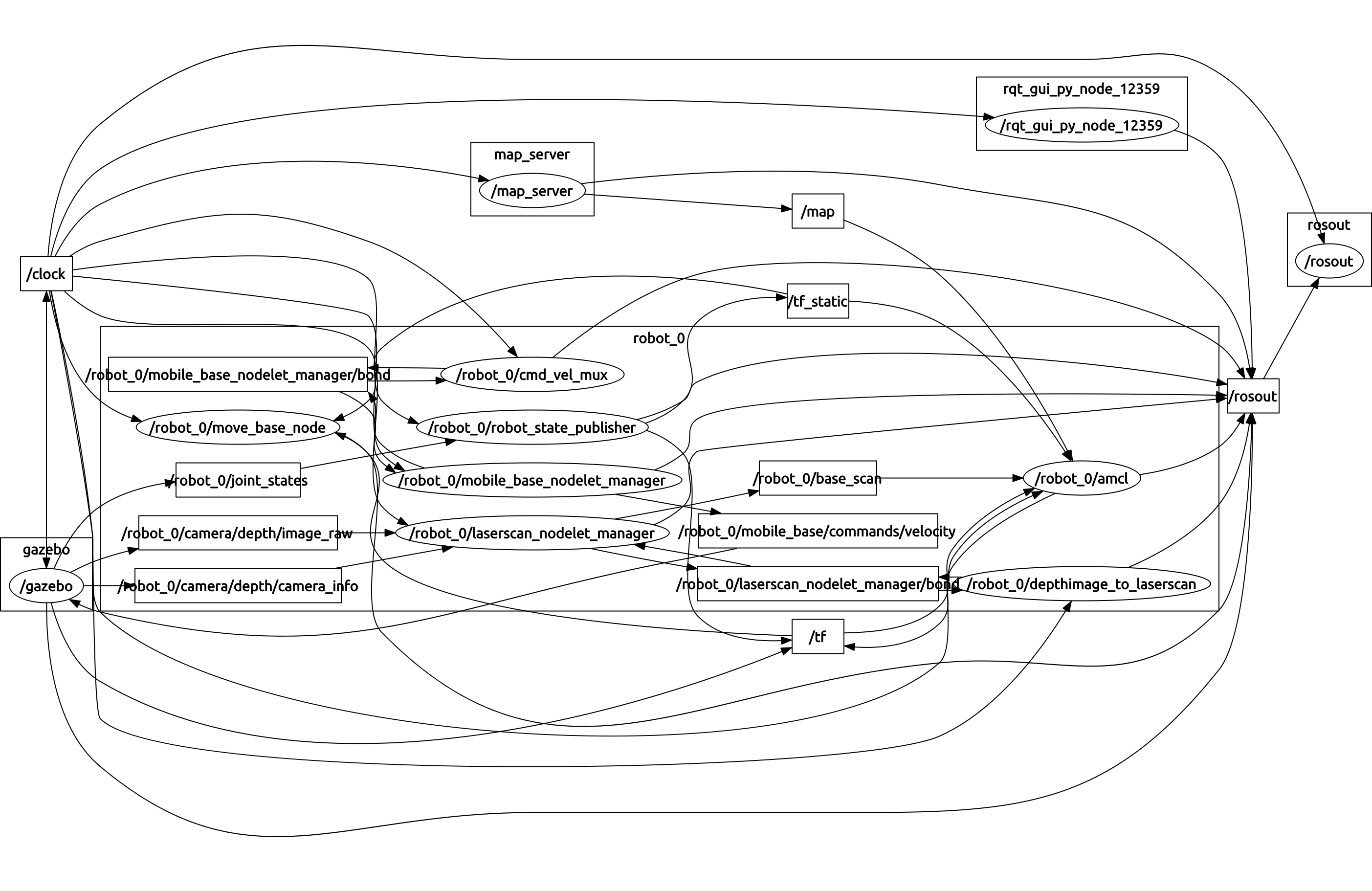
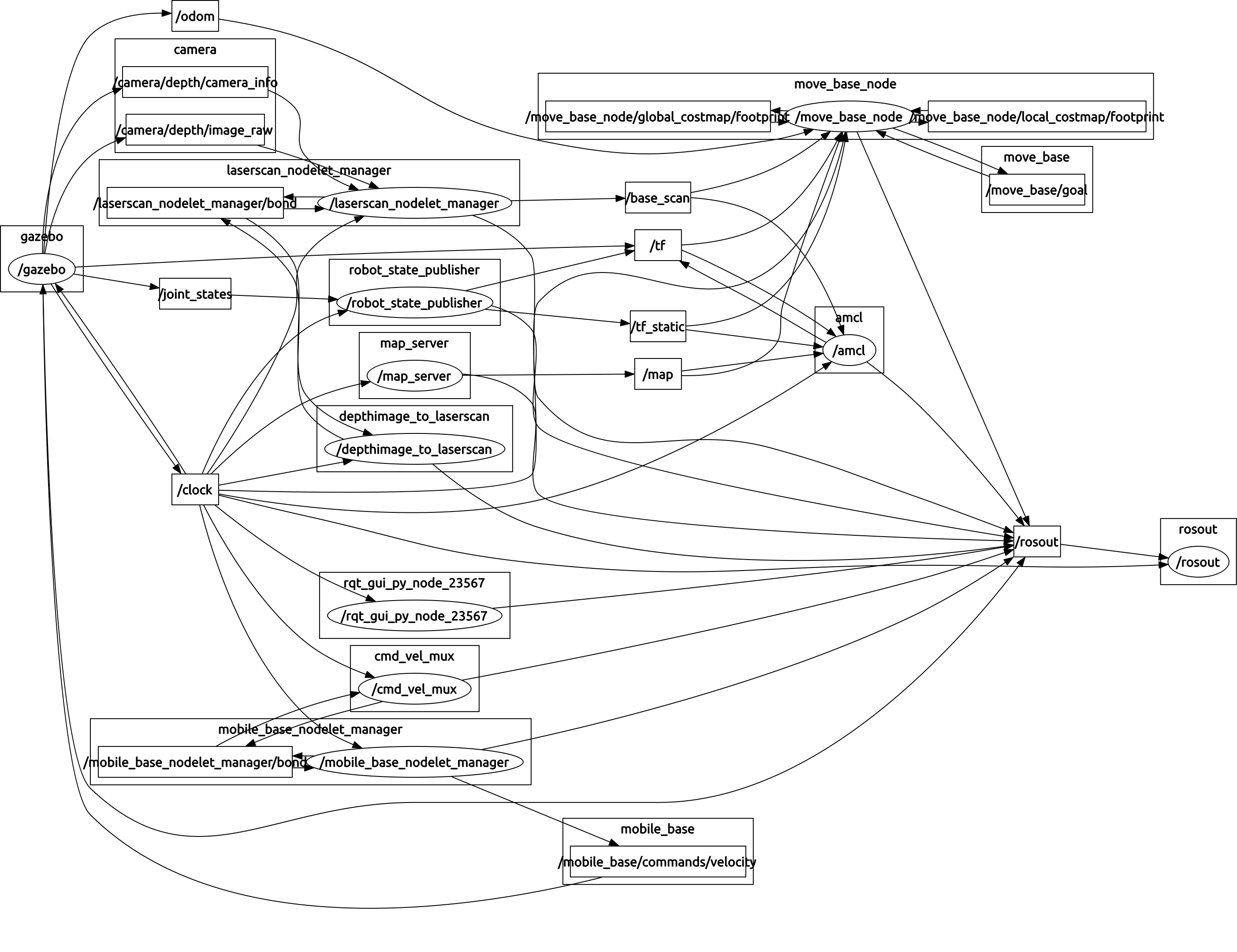
| 2016-12-23 01:55:21 -0500 | asked a question | no TF between base_link and map in multiple-robots in gazebo Hello everyone, I want to simulate two robots( turtlebots ) in gazebo instead of stage_ros. I use the model described in here, and the TF problem( no transform from map to odom in amcl. The topic flow is below.
In this experiment, I only add one robot with I also try to delete the Could you help me, please.. Thanks first. |
| 2016-11-15 04:19:32 -0500 | commented answer | vision navigation in indigo I use RTABmap instead of gmapping since I don't have laser. It works well for me and it could also listen laser scan topic in RTABmap, I think it's a good choice. Besides, if you use mono camera, maybe you could use ORBSLAM. |
| 2016-09-30 15:25:10 -0500 | marked best answer | Xtion_pro_live Skeleton_tracker cannot work Hello everyone, |
| 2016-08-27 05:05:43 -0500 | received badge | ● Famous Question (source) |
| 2016-07-26 10:49:03 -0500 | answered a question | add AR tag in gazebo Well, I have solved this problem.
A sample approach is to change the original model.
For example, since the model |
| 2016-07-26 06:38:30 -0500 | asked a question | add AR tag in gazebo Hello everyone, I'm wondering how to add an Thanks first! |
| 2016-07-15 20:16:11 -0500 | commented answer | how to change the plugin's param in launch Thanks for your answer. If the parameters were defined in the inheritance class, I could reconfigure them in lanch.But the problem is that they are defined in the base class. How could I reconfigure them in the launch file? The instance of this problem is the jpeg quality in the image_transport. |
| 2016-07-15 20:09:27 -0500 | received badge | ● Notable Question (source) |
| 2016-07-14 09:14:23 -0500 | received badge | ● Popular Question (source) |
| 2016-07-14 01:50:03 -0500 | asked a question | how to change the plugin's param in launch Hello! I find that Thanks first! |
| 2016-07-07 14:10:21 -0500 | received badge | ● Famous Question (source) |
| 2016-07-05 14:47:32 -0500 | received badge | ● Notable Question (source) |
| 2016-05-24 10:02:18 -0500 | commented answer | QPainter::begin: Paint device returned engine == 0, type: 3 Thanks for your advice! I had solved this problem last years but I forget the detail approach. I remember that I also give the full path to the directory. I think you are right. Thanks again. |
| 2016-05-24 01:27:39 -0500 | answered a question | which version of Opencv should I use? Hello, both of them are great, if you have not learned However, when you want to use If you want to know more about the difference between |
| 2016-05-23 02:14:56 -0500 | commented answer | Face detection with ROS Indigo and laptop webcam I mean, since |
| 2016-05-23 02:13:54 -0500 | commented answer | Face detection with ROS Indigo and laptop webcam Well, what you need to do is not change the codes in openni. |
| 2016-05-22 20:43:26 -0500 | commented answer | Face detection with ROS Indigo and laptop webcam It's not easy to use a big package directly : ) |
| 2016-05-22 20:41:59 -0500 | commented answer | Face detection with ROS Indigo and laptop webcam Besides, if you have linked your |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.