
no TF between base_link and map in multiple-robots in gazebo
Hello everyone,
I want to simulate two robots( turtlebots ) in gazebo instead of stage_ros. I use the model described in here, and the TF problem( no transform from map to odom in amcl.Timed out waiting for transform from robot_0/base_link to map to become available before running costmap, tf error: . canTransform returned after 0.1 timeout was 0.1.) occurs. There is also another problem here, the author could add two or more robots in stage_ros but when I change the code to gazebo( simply change the world model , add gazebo_ros, change the global_frame_id,etc ), the TF problem still stay.
The topic flow is below.
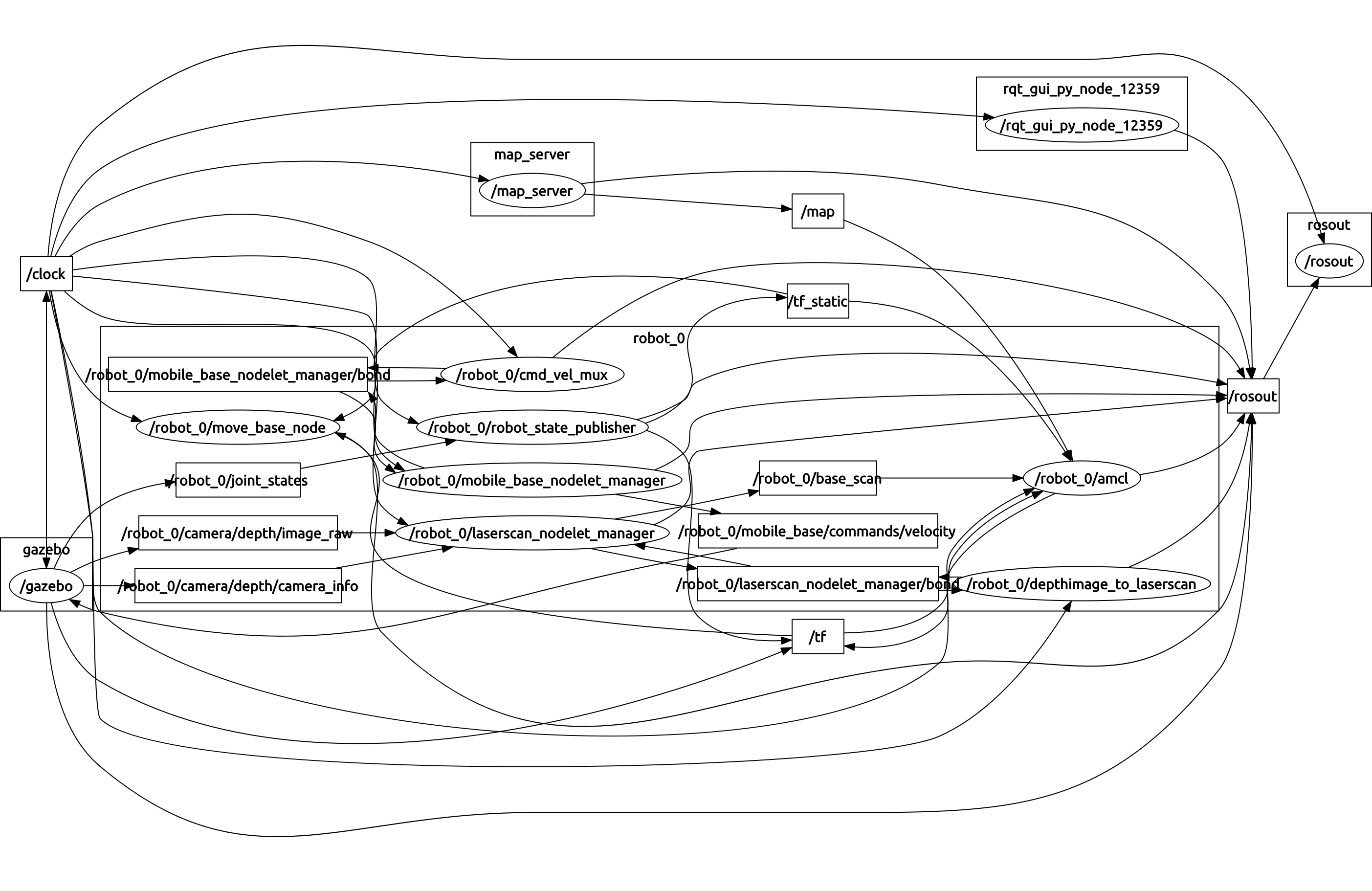
In this experiment, I only add one robot with tf_prefix and ns, as I think if one robot is ok, than two is also.
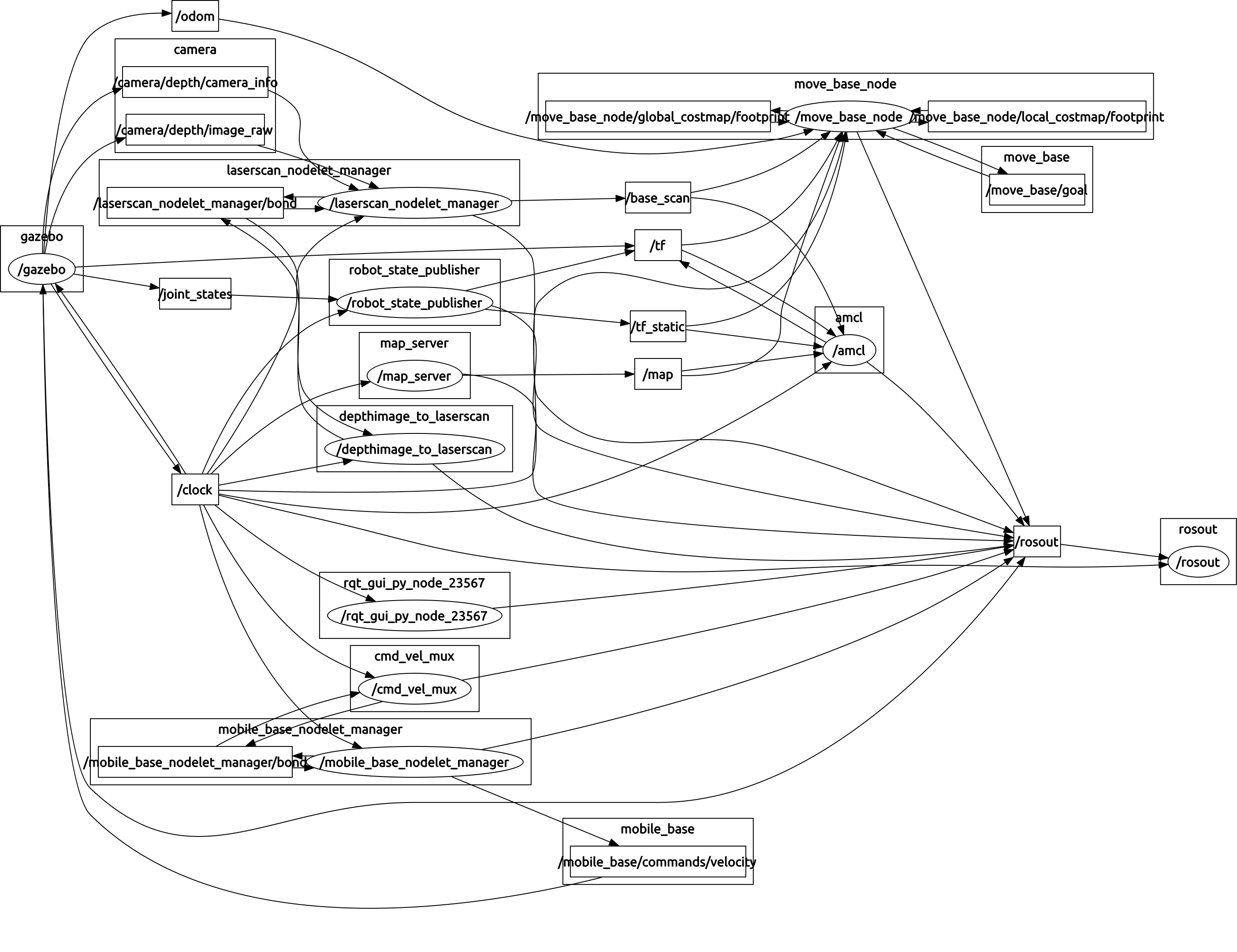
I also try to delete the ns and tf_prefix, than the single robot could work and the topic is here.
Could you help me, please..
Thanks first.
