The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-03-11 12:07:55 -0500 | asked a question | rospy.service.ServiceException: transport error rospy.service.ServiceException: transport error Hi, we have just recently updated our system to these versions: franka |
| 2020-08-02 15:56:09 -0500 | commented answer | Switching between controllers with ros_control / controller_manager When my own controller was switched to another controller effort_controllers/JointTrajectoryController, it was successfu |
| 2018-11-14 13:16:53 -0500 | received badge | ● Famous Question (source) |
| 2018-11-14 13:16:53 -0500 | received badge | ● Notable Question (source) |
| 2018-04-19 05:50:04 -0500 | commented question | IBVS for a 7-dof arm with ViSP in ROS You could search Visp library which provides ROS interface, its link is http://visp.inria.fr/ |
| 2018-03-28 21:51:00 -0500 | commented question | IBVS for a 7-dof arm with ViSP in ROS yes, it did work. You can find ros interface for visp library. |
| 2017-04-28 20:39:39 -0500 | received badge | ● Good Question (source) |
| 2016-11-25 08:17:19 -0500 | received badge | ● Nice Question (source) |
| 2016-08-02 22:16:09 -0500 | commented answer | how to plan a trajectory in cartesian space using OMPL I interpolate straight line with compute_cartesian_path(), but the calculated joint accelerations are very big even if I modify the jump_threshold value, do you know how to improve it? |
| 2016-05-08 15:06:39 -0500 | marked best answer | IK controlling library for Schunk 7-DOF manipulator Hi all, since i have initialized my Schunk 7-DOF arm, i would like to ask , is there any inverse kinematics library to control this manipulator? PS: Ubuntu 12.04 LTS/FUERTE Thanks! |
| 2016-04-24 02:30:46 -0500 | received badge | ● Famous Question (source) |
| 2016-04-22 02:52:24 -0500 | commented question | How to create map with gmapping Yes, my TF tree is not correct at first, you should check your tf tree, maybe this can help. |
| 2016-04-22 02:47:40 -0500 | commented question | IK controlling library for Schunk 7-DOF manipulator I used MoveIt! library, you can try it link text. |
| 2016-04-22 02:47:39 -0500 | commented question | IK controlling library for Schunk 7-DOF manipulator I used MoveIt! library, you can try it http://moveit.ros.org . |
| 2015-10-28 11:54:05 -0500 | received badge | ● Famous Question (source) |
| 2015-10-02 09:45:37 -0500 | received badge | ● Notable Question (source) |
| 2015-09-27 14:05:42 -0500 | received badge | ● Popular Question (source) |
| 2015-09-25 03:48:36 -0500 | received badge | ● Associate Editor (source) |
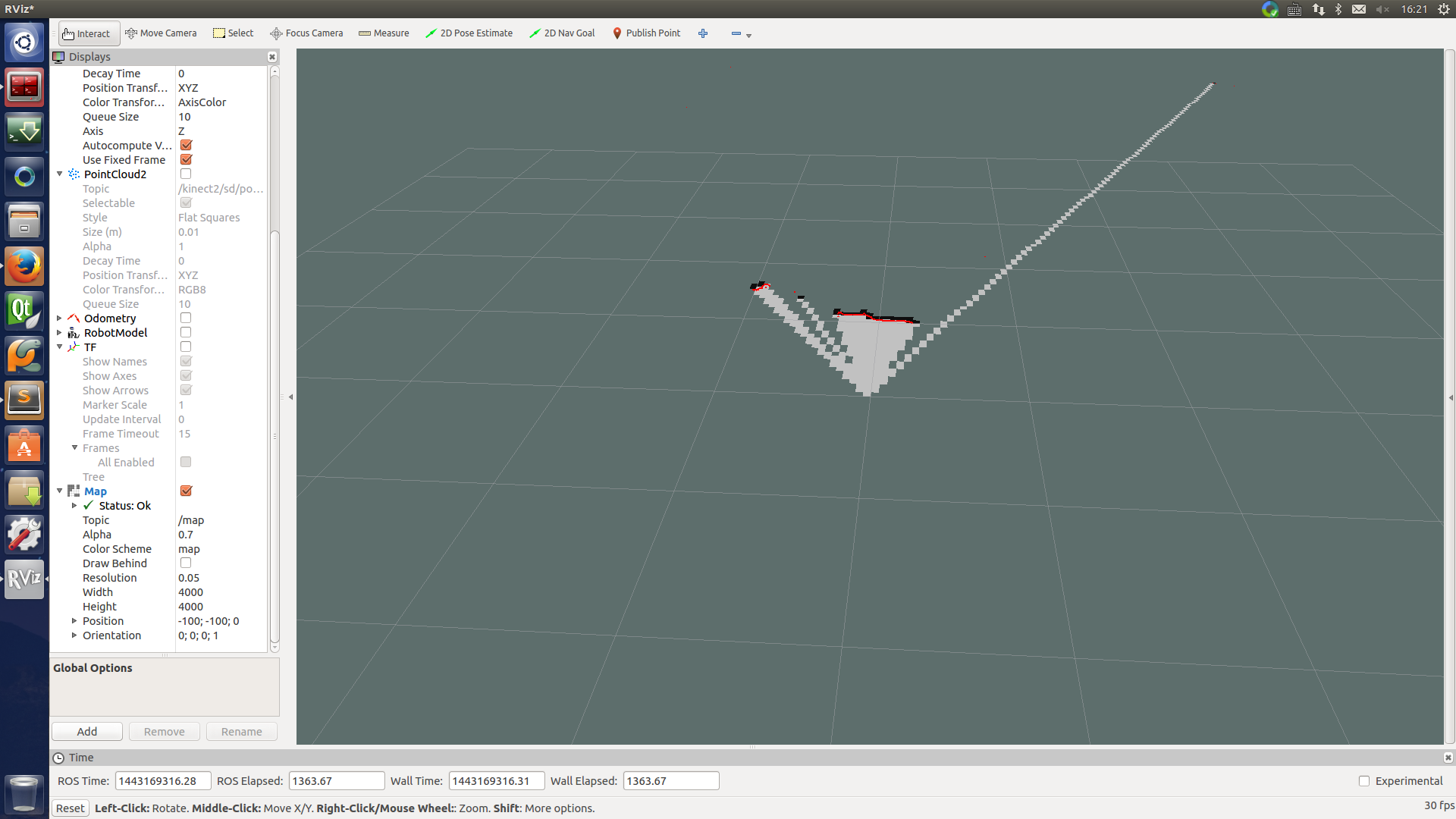
| 2015-09-25 03:41:02 -0500 | asked a question | How to create map with gmapping Hi, I am using irobot create2 and kinect2 to create map with gmapping, fake laser scan can be created correctly,but i met a problem now when creating map, this is what i have done: (1) start irobot driver (2) start kinect2 driver and depthimage_to_laserscan is also included correctly (3) run gmapping (4) start rviz It only shows the map of first-sight view, when i move my kinect2, the map doesn't change and laser scan is moving. It outputs like: [ WARN] : Failed to compute laser pose, aborting initialization (Lookup would require extrapolation into the future. Requested time 1443169289.383570176 but the latest data is at time 1443169289.318866014, when looking up transform from frame [map] to frame [base_link]) -maxUrange 9.99 -maxUrange 9.99 -sigma 0.05 -kernelSize 1 -lstep 0.05 -lobsGain 3 -astep 0.05 -srr 0.1 -srt 0.2 -str 0.1 -stt 0.2 -linearUpdate 1 -angularUpdate 0.5 -resampleThreshold 0.5 -xmin -100 -xmax 100 -ymin -100 -ymax 100 -delta 0.05 -particles 30 update frame 0 update ld=0 ad=0 Laser Pose= 0 0 -0.00514984 m_count 0 Registering First Scan
|
| 2015-07-29 13:51:14 -0500 | received badge | ● Popular Question (source) |
| 2015-07-28 22:39:57 -0500 | commented answer | Where is brics_actuator package? yes, i have done this before, but i didn't find brics_actuator in cob_common. |
| 2015-07-28 21:25:55 -0500 | asked a question | Where is brics_actuator package? Hi all, i didn't find brics_actuator package in ROS indigo, did anyone know where is the new version for this package? Thanks! Regards, Quantao |
| 2015-07-01 04:21:18 -0500 | marked best answer | How to implement velocity transformation? Hi all, i have the velocity topic /cmd_vel, and it's the type geometry_msgs::Twist, it is given in the object reference frame, and now i need to transform the velocity to another frame, such as my robot's base frame. How can i do that, if i know the translation and rotation between the two frames? I think it is different from position transformation, because velocity is 6 dimension and position only 3. Does someone have this knowledge? Any help is appreciated. |
| 2015-07-01 04:21:17 -0500 | received badge | ● Supporter (source) |
| 2015-05-20 04:21:29 -0500 | received badge | ● Famous Question (source) |
| 2015-05-20 04:21:29 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.