
Multiple Kinects: Same Topics from different nodes, how to subscribe?
Hi All,
If anyone has any links or references about connecting 2 or more Kinects to the same computer and specifically obtaining & integrating data from them, could you please reply here?
So I am able to launch separate files for each kinect and am able to launch data separately. Here's the output of my rxgraph
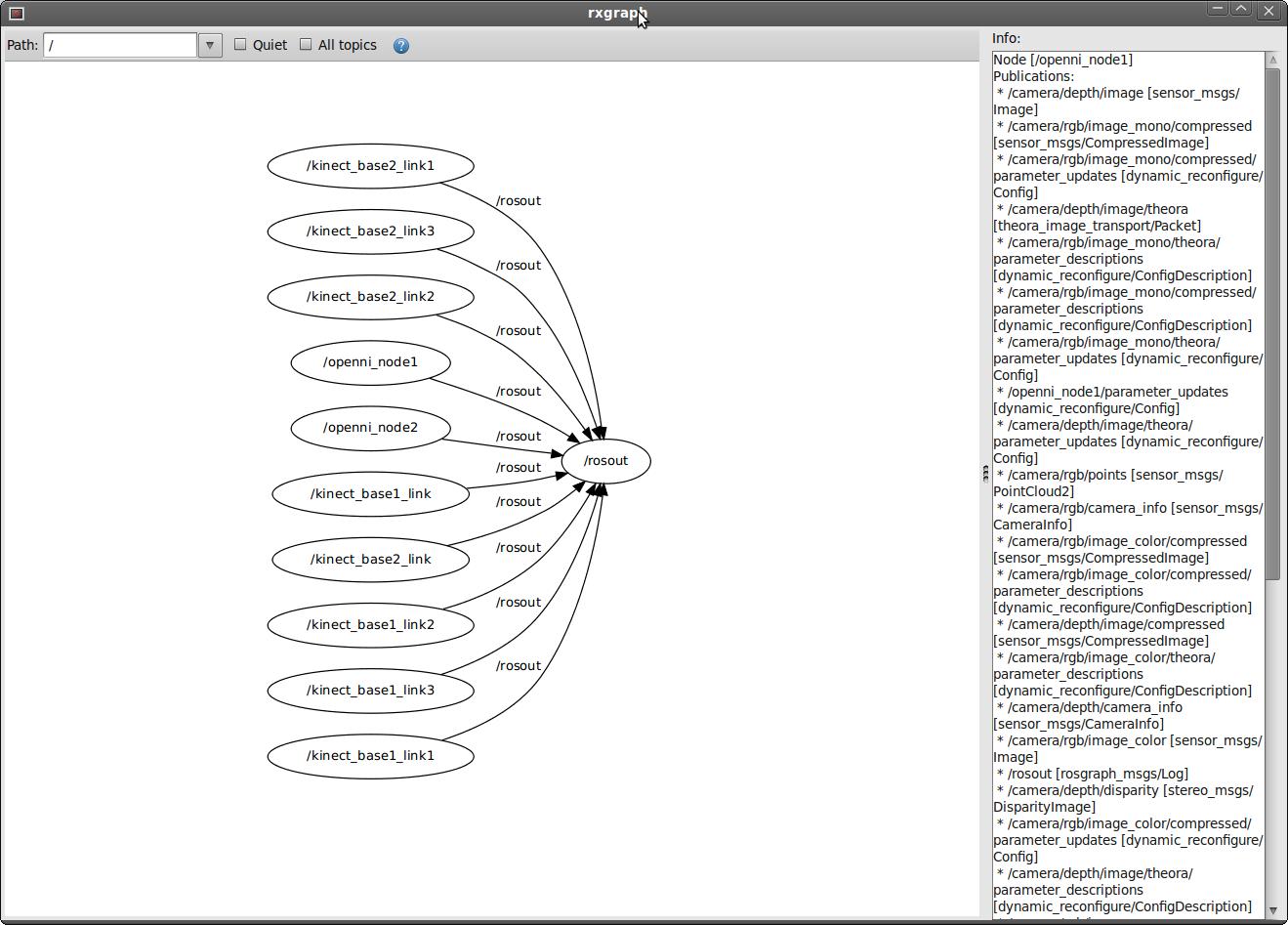
The problem is my process listens to a topic and it cannot distinguish between same topics from different nodes, how can I make them publish topics with unique names? or how can I listen to topics from a specific node?
Best,
CV
Comments
Could you specify what you mean by multiple kinects? Do you want data on connecting multple kinects on one computer or are you talking data fusion?
@tfoote: I've edited the question, thank you.
add a comment

