
Why /base_footprint's position is not (0,0,0) in /tf?
I echo /tf:
-
header:
seq: 0
stamp:
secs: 1310
nsecs: 562000000
frame_id: /base_footprint
child_frame_id: /base_link
transform:
translation:
x: 0.0
y: 0.0
z: 0.051
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
But I found that in gazebo it shows (0,0,0).
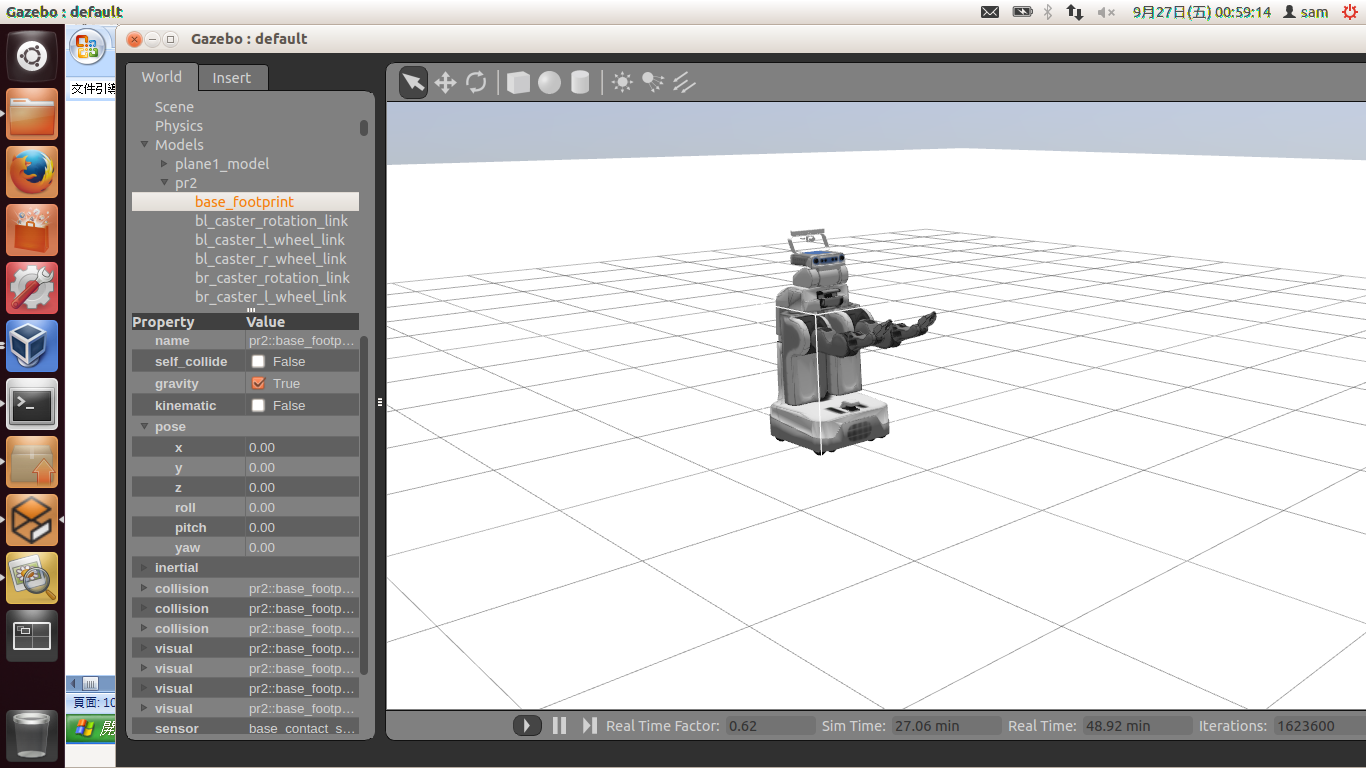
What's happened?
add a comment

