
move_base error: Unable to lookup transform, cache is empty
Hi,
I am using turtlebot2 (kobuki+kinect) to make the map. gmapping works ok. but when I give the goal in rviz, move_base node omit the error below. It seems base_local_planner can not transform /odom to /map. but I check the tf with command tf_echo, tf_monitor,tf_viewframe. no clue found.
Thanks any help.
I find two similar questions, but no answer.
extrapolation-error-using-hector_mapping-move_base extrapolation-error-of-local-cost-map-in-navigation
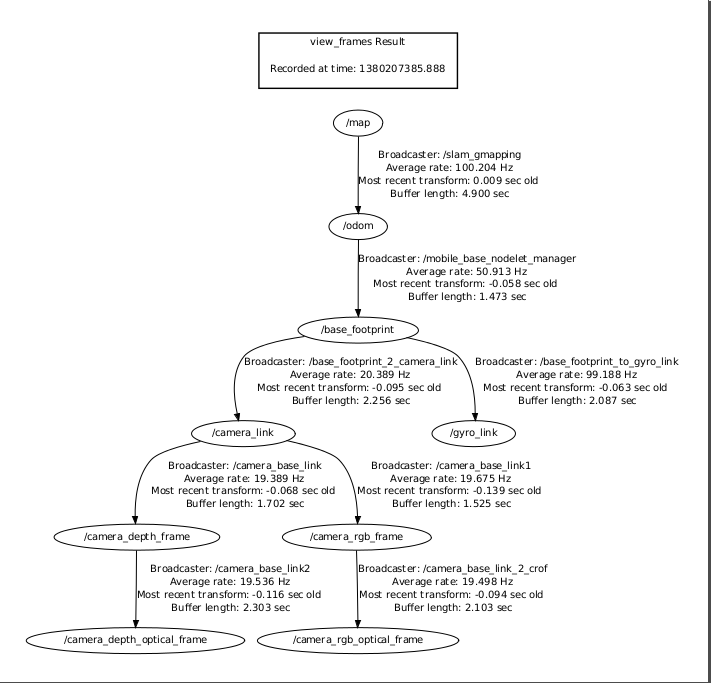
my tf tree:
C:\fakepath\Screenshot from 2013-09-26 23:49:56.png
[ WARN] [1380208610.699597142]: Could not transform the global plan to the frame of the controller
[ERROR] [1380208610.899298578]: Extrapolation Error: Unable to lookup transform, cache is empty, when looking up transform from frame [/odom] to frame [/map]
[ERROR] [1380208808.222581361]: Global Frame: /odom Plan Frame size 13: /map
rosrun tf tf_monitor
RESULTS: for all Frames
Frames:
Frame: /base_footprint published by /mobile_base_nodelet_manager Average Delay: -0.0229974 Max Delay: 0.354185
Frame: /camera_depth_frame published by /camera_base_link_2_camera_depth_frame Average Delay: -0.12366 Max Delay: 0.224775
Frame: /camera_depth_optical_frame published by /camera_base_link_2_camera_depth_optical_frame Average Delay: -0.124423 Max Delay: 0.227307
Frame: /camera_link published by /base_footprint_2_camera_link Average Delay: -0.0773685 Max Delay: 0.177639
Frame: /camera_rgb_frame published by /camera_base_link_2_camera_rgb_frame Average Delay: -0.123725 Max Delay: 0.226237
Frame: /camera_rgb_optical_frame published by /camera_base_link_2_crof Average Delay: -0.124212 Max Delay: 0.192336
Frame: /gyro_link published by /base_footprint_to_gyro_link Average Delay: -0.0236702 Max Delay: 0.260833
Frame: /odom published by /slam_gmapping Average Delay: 0.000628292 Max Delay: 0.00346015
All Broadcasters:
Node: /base_footprint_2_camera_link 19.9931 Hz, Average Delay: -0.0773685 Max Delay: 0.177639
Node: /base_footprint_to_gyro_link 98.9593 Hz, Average Delay: -0.0236702 Max Delay: 0.260833
Node: /camera_base_link 10.0197 Hz, Average Delay: -0.125868 Max Delay: 0.112013
Node: /camera_base_link1 10.0197 Hz, Average Delay: -0.121158 Max Delay: 0.226237
Node: /camera_base_link2 10.0171 Hz, Average Delay: -0.126665 Max Delay: 0.0916436
Node: /camera_base_link3 10.0372 Hz, Average Delay: -0.126777 Max Delay: 0.0992249
Node: /camera_base_link_2_camera_depth_frame 10.0304 Hz, Average Delay: -0.120865 Max Delay: 0.224775
Node: /camera_base_link_2_camera_depth_optical_frame 10.0197 Hz, Average Delay: -0.122189 Max Delay: 0.227307
Node: /camera_base_link_2_camera_rgb_frame 10.0196 Hz, Average Delay: -0.126318 Max Delay: 0.092681
Node: /camera_base_link_2_crof 10.0176 Hz, Average Delay: -0.121966 Max Delay: 0.192336
Node: /mobile_base_nodelet_manager 50.2985 Hz, Average Delay: -0.0229974 Max Delay: 0.354185
Node: /slam_gmapping 100.098 Hz, Average Delay: 0.000628292 Max Delay: 0.00346015
rosrun tf tf_echo /map /odom
redheli@redheli-MacBookPro:~/bagfiles$ rosrun tf tf_echo /map /odom
At time 1380209595.389
- Translation: [-0.045, 0.002, 0.000]
- Rotation: in Quaternion [0.000, 0.000, -0.011, 1.000]
in RPY [0.000, 0.000, -0.021]
At time 1380209596.389
- Translation: [-0.045, 0.002, 0.000]
- Rotation: in Quaternion [0.000, 0.000, -0.011, 1.000]
in RPY [0.000, 0.000, -0.021]
At time 1380209597.389
- Translation: [-0.045, 0.002, 0.000]
- Rotation: in Quaternion [0.000, 0.000, -0.011, 1.000]
in RPY [0.000, 0.000, -0.021]
At time 1380209598.389 ...add a comment


{kind=link}