
Why is that r_forearm_joint and r_gripper_palm_link are always in collision ?
Sorry,because I ask moveit mailing list, but no people answer yet. So I ask problem here and hope you to help.
My problem:
My system is ubuntu12.04 and ros groovy. I try to setup MoveIt in real PR2.
According to MoveIt tutorials I finish setting yaml and launch files of controller and run optirun roslaunch pr2_moveit_generated moveit_planning_execution.launch
I select random point in rviz, but r_forearm_joint and r_gripper_palm_link display red.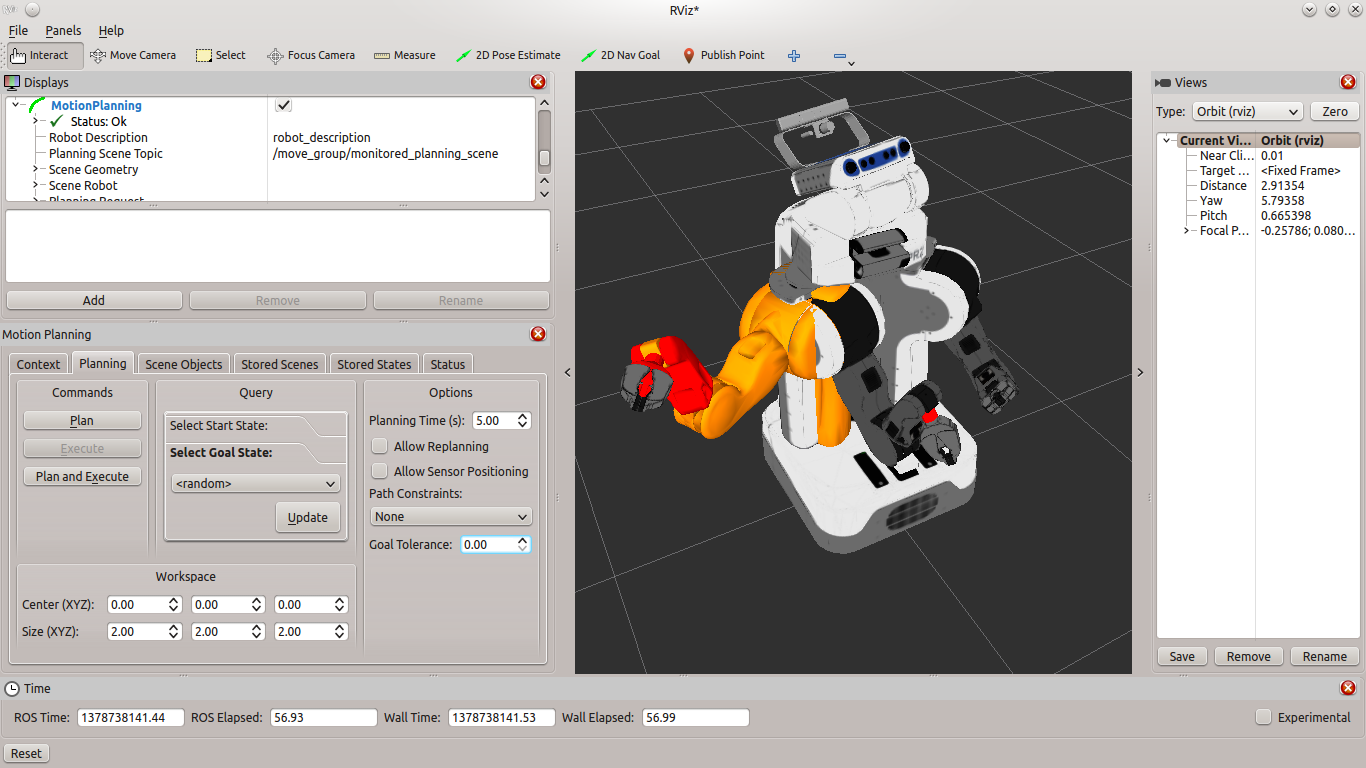
I try to select random point again and again or pull arm of PR2 by myself in rviz, but r_forearm_joint and r_gripper_palm_link always display red. I plan and have error message(link text).
I attach srdf of PR2, urdf of PR2 and hope that you can reproduce the problem.
Why is that r_forearm_joint and r_gripper_palm_link always display red ? Thank you.
