
[Octomap] Not updating the map in real time?
Hi
I am currently using 2d Navigation stack (and Slam, gmapping) with Groovy on Ros, my OS is Ubuntu 12.04 For 3D visualization, I used Octomap for 3D map (JUST FOR VISUALIZATION PURPOSE), and then use 2d Navigation stack for collision checking.
However, the 3D occupancy grid (visualize in Rviz using "marker array") published by Octomap doesn't update itself in the realtime. As with the Navigation, the 2D map published will self-correcting itself as the robot is traveling around. But the 3D occupancy grid just stays there even if it's not correct, and will never erase or align itself, etc.
Here is the result. 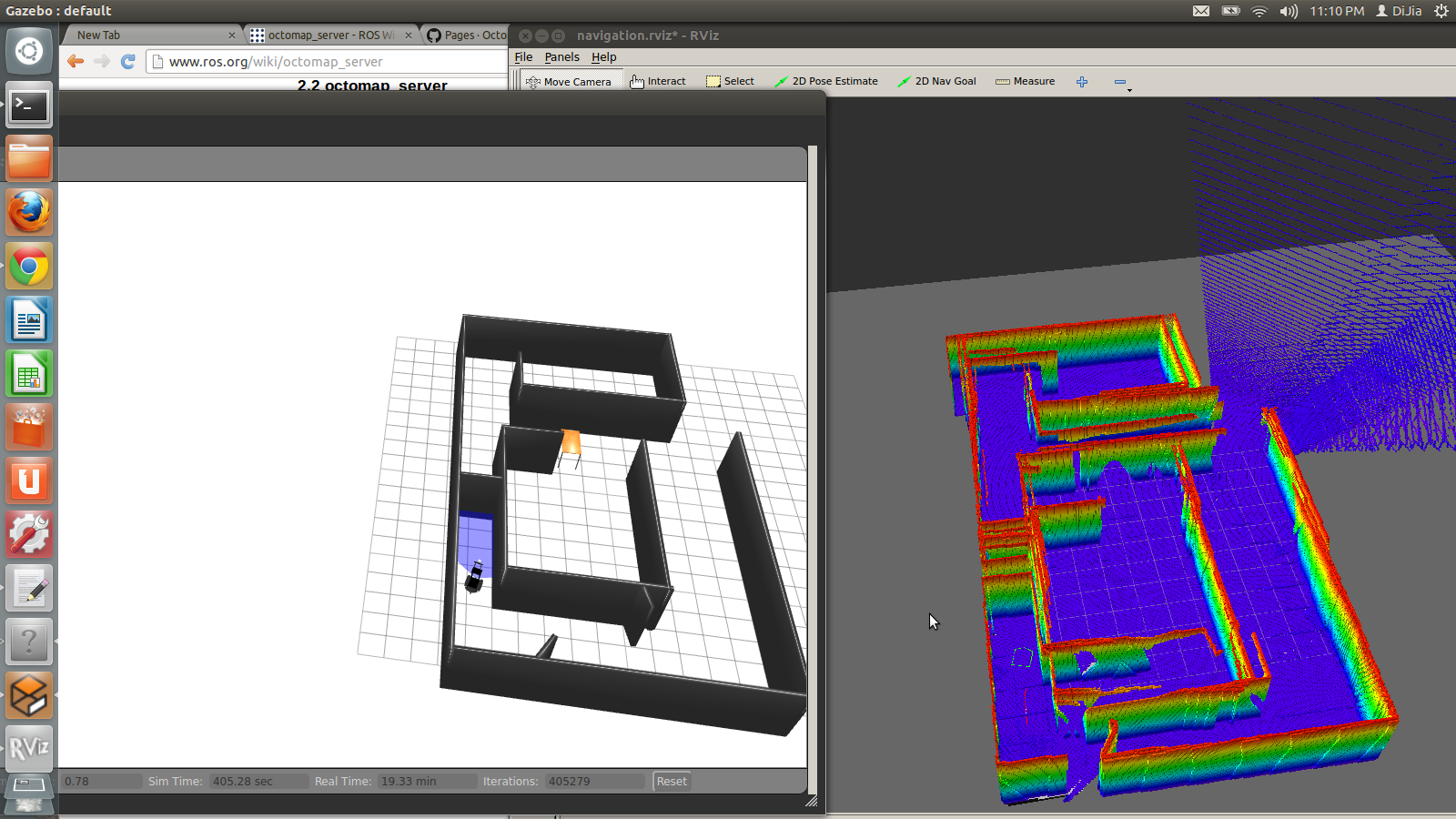 and
and 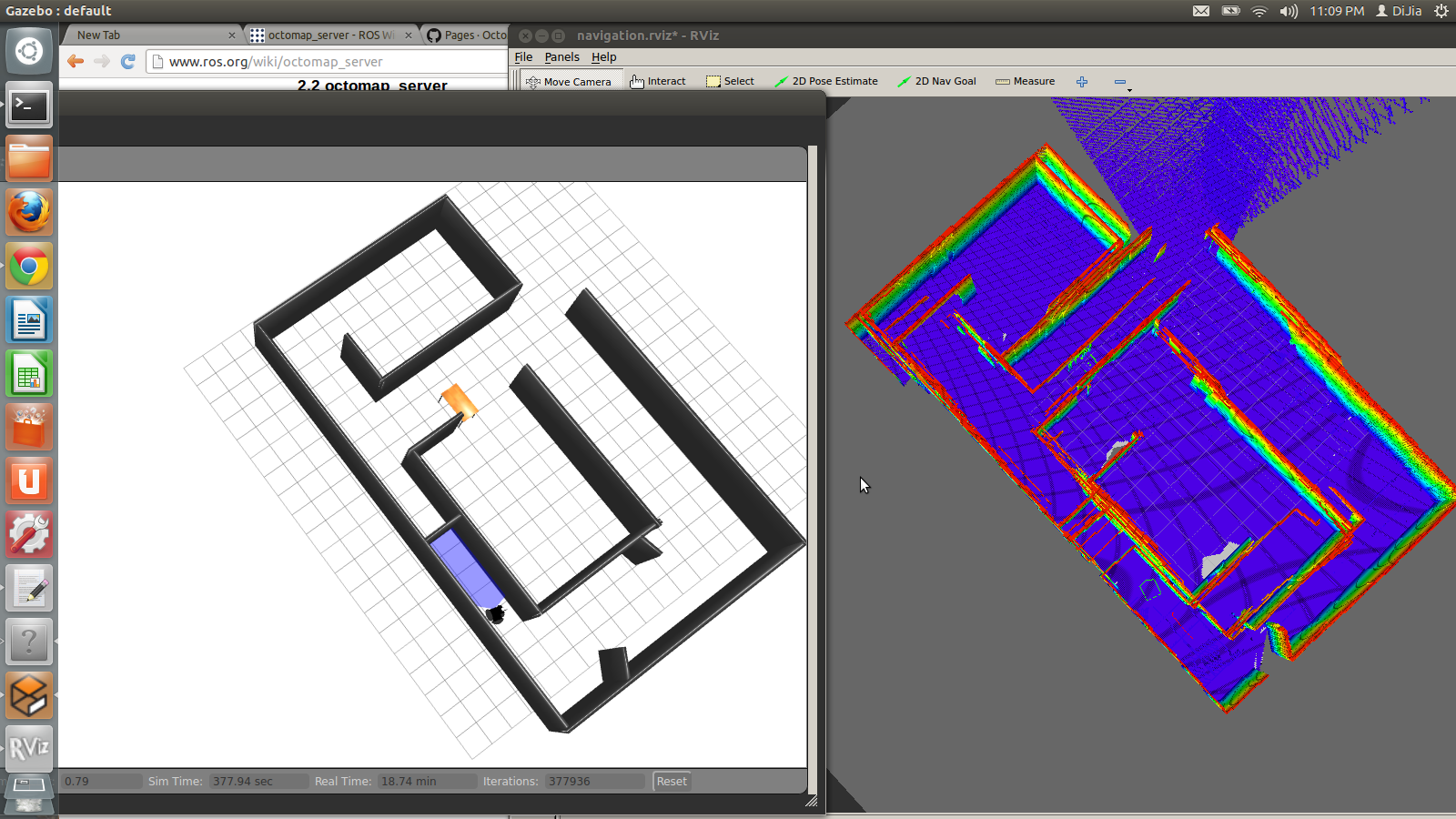
I am wondering is there any parameters that I could configure to update the 3d occupancy grid in real time?
Thank you all!

Having the same issue, were you able to solve this?