
`Message No map received` in Rviz
Hi,
I try to build a map in Rviz using turtlebot simulation in gazebo. First I create a package and write a launch file which open GAZEBO world and turtlebot in that environment ...
That is the Launch file
<launch>
<node name="gazebo" pkg="gazebo" type="gazebo" args="-u $(find gazebo_worlds)/worlds/simple_office.world"/>
<param name="/use_sim_time" value="true"/>
<node name="gazebo_gui" pkg="gazebo" type="gui"/>
<include file="$(find turtlebot_gazebo)/launch/robot.launch"/>
<include file="$(find turtlebot_teleop)/keyboard_teleop.launch"/>
</launch>
Then I run rosrun gmapping slam_gmapping scan:=base_scan _odom_frame:=odom_combined
Then open Rviz with rosrun rviz rviz -d 'rospack find turtlebot_navigation' /nav_rviz.vcg , this command does not open plugins required for gmapping as it can not locate nav_rviz.vcg, so finally I open rviz from launch file
<launch>
<node pkg="rviz" type="rviz" name="$(anon rviz)" args="-d $(find turtlebot_navigation)/nav_rviz.vcg"> </node>
</launch>
It work well at lest it run all requirements for gmapping ....
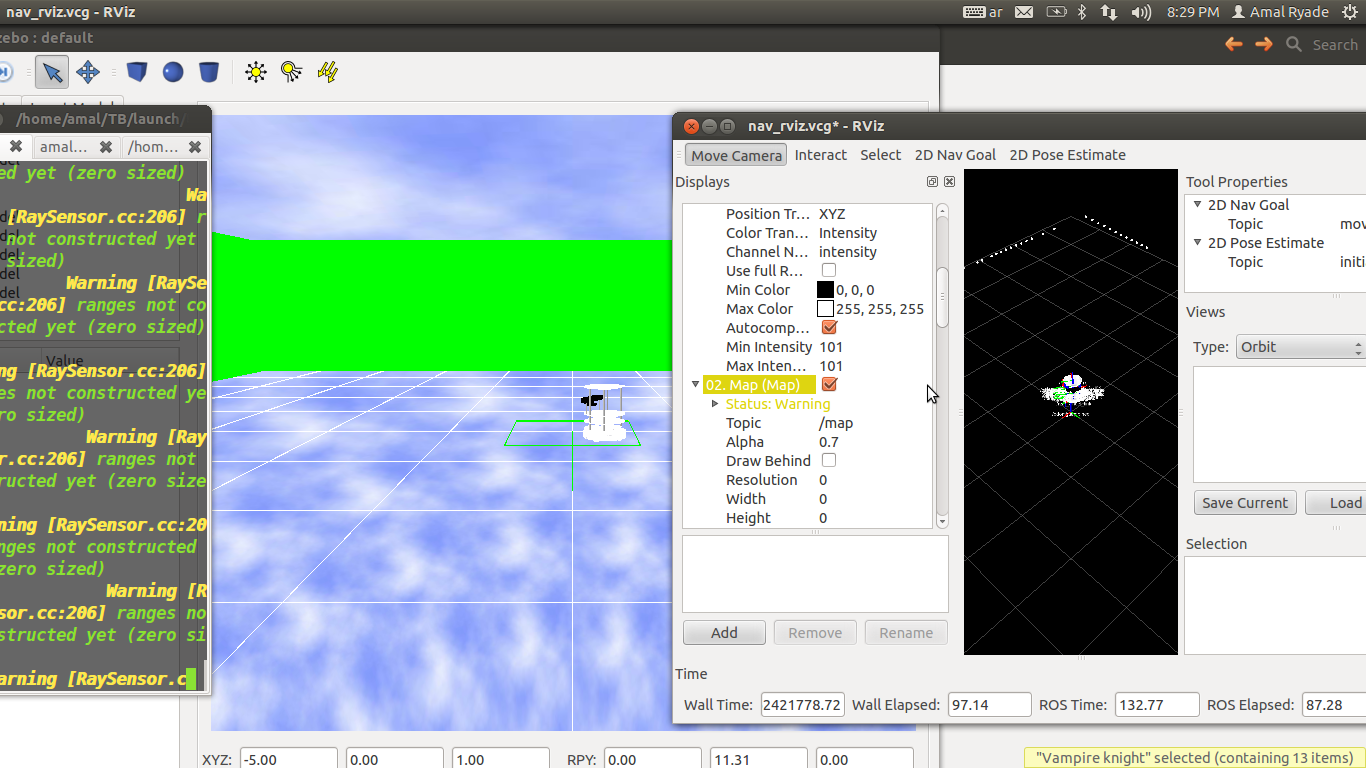
The problem now that when I move robot in gazebo, robot move in rviz too but does not make a map, and I find that massage in rviz : Message No map received
Edit I write this command
amal@amal-HP-G62-Notebook-PC:~$ rosrun gmapping slam_gmapping scan:=base_scan _odom_frame:=odom_combined
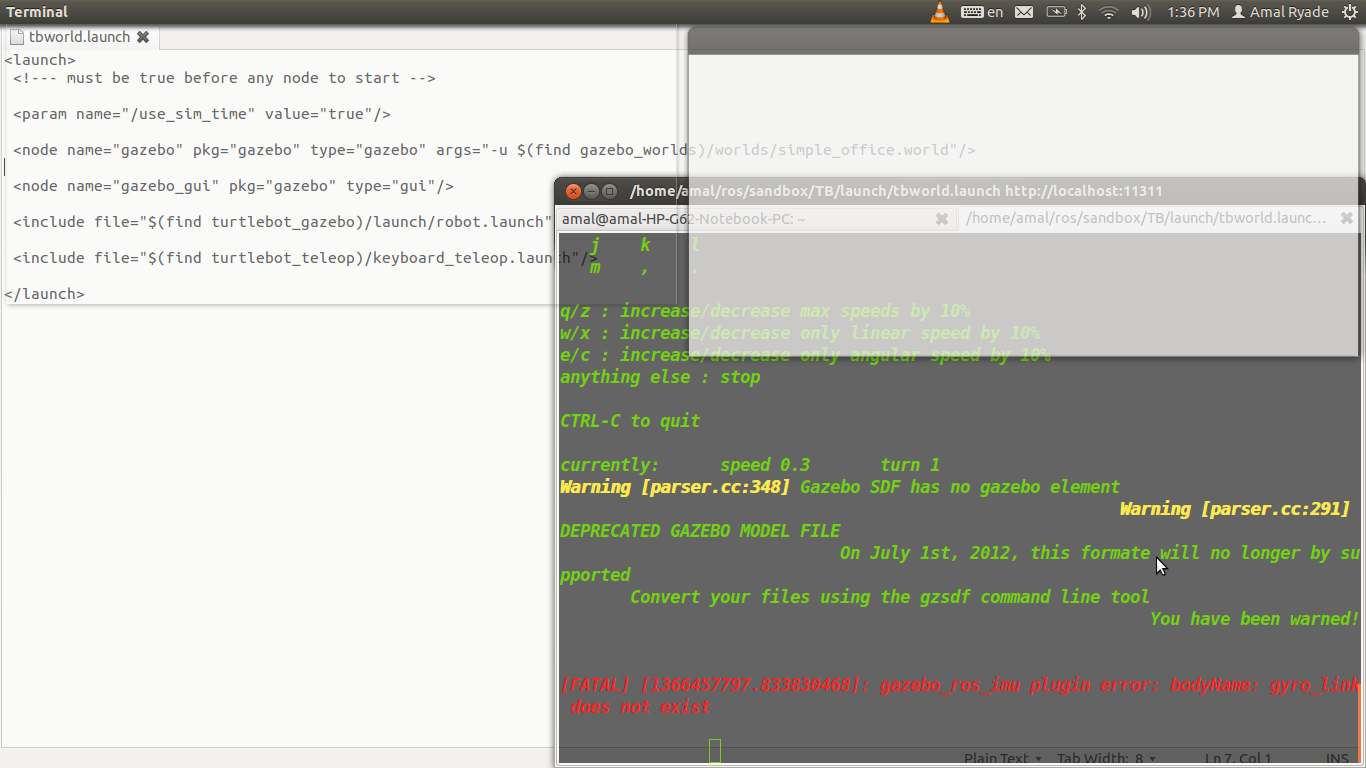
and nothing else in is written in terminal see warning
Edit2 That is the map but I think it will not accurate if there is more details in the environment and It seems to be footprints !!
Edit3
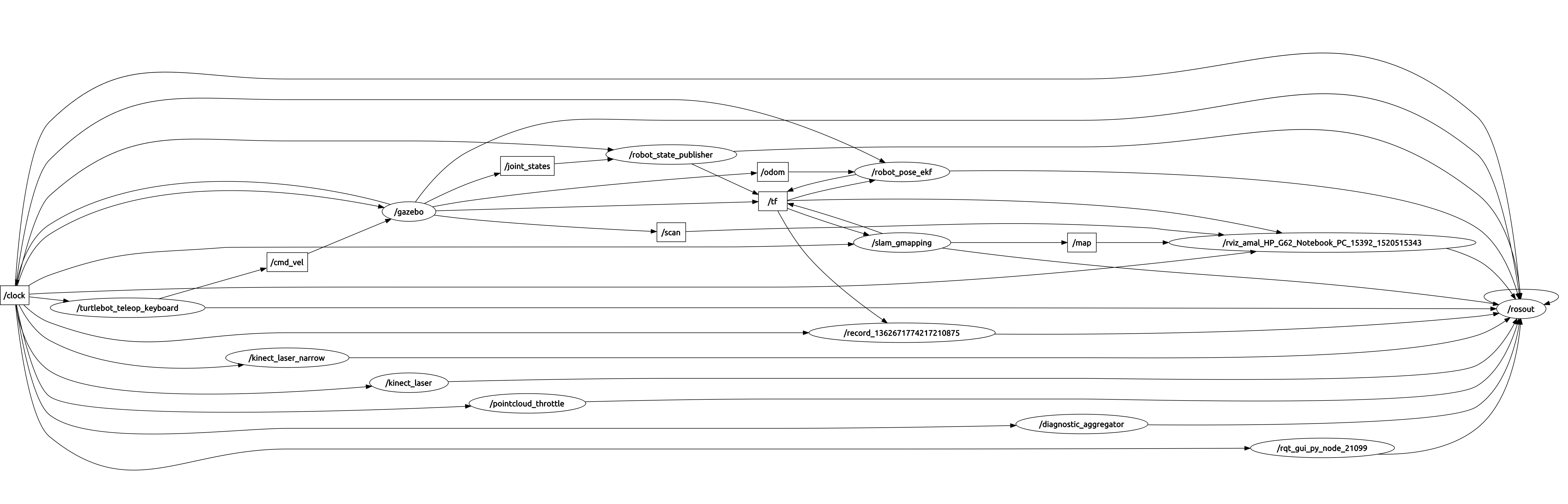
Hi, I have a problem now, when I open RVIZ it seem there is a problem in laser scan, map, robot model, and tf here is
do not know which file I have to check gyro in !! That is the error
any suggestion , Thanks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
What is the gmapping output.
it does not get any output on rviz
I meant the console output.
I edit the Q
Can you check if there is laser data?
how to do this ?!
The simplest way would be an rviz display.
I edit the Q