slam in gmapping auto turnaround
I make a experiment as follow.
1、the robot is static.
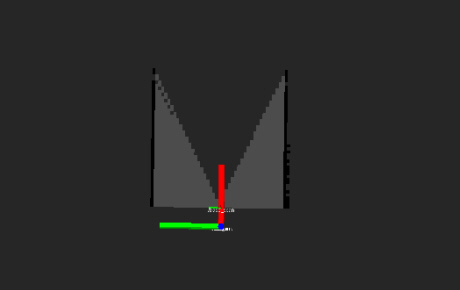
2、provide corridor laser information like this:
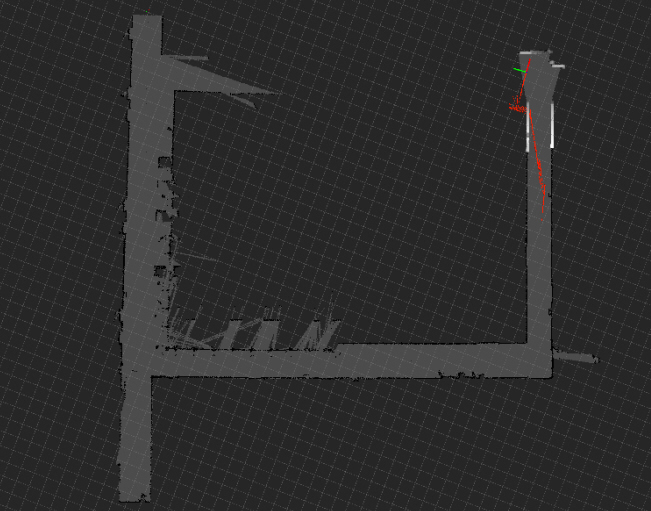
3、suppose the robot move following x-axis from (0, 0) as a speed 0.2m/s, and provide the odom data to simulate the process. In this case, the direction of the robot is always 0 degree. However, the result is:
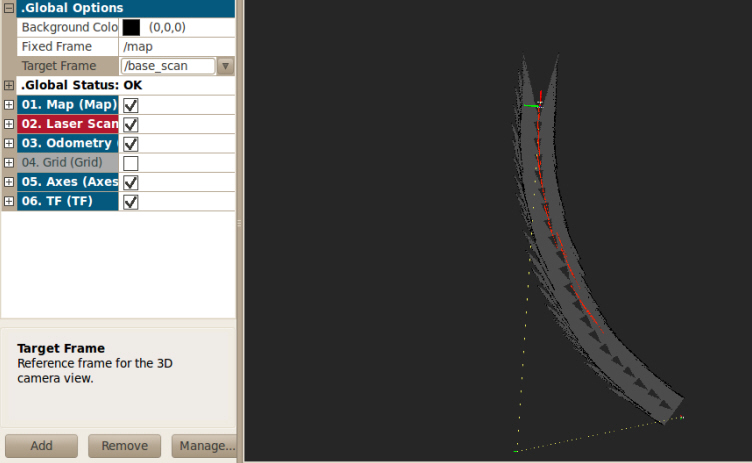
If the robot have enough time for running, the trajectory would be a circle. Unbelievable!
Comments
It looks as there is very little overlap from consecutive scans. Is this also like that in the raw data?
The robot is static, so the scan data is always the same. Does this would have problem? Why the overlap from consecutive scans would have problem? Raw data? Do you mean the scan data before Gmaping?
In 3.: Did you provide odom that signals the robot moving at 0.2m/s and always the same static scan? That cannot work.
yes, you are right. But why it can not work?
gmapping is basically an algorithm that merges odometry and laser information into a map. You are now feeding laser from one source (static) and odometry from a different one (moving), thus any try to merge that can only be wrong - what would you expect as the map here, anyways?
I want to simulate a process in which the robot move straight in a corridor. In this process, the scan data would always the same or can be consider the same though odom is changing.
The reason why I'm designed this experiment is to find out what cause the map have drift the robot error or parameter setting error, etc.
The valid range seems to be only 2m, so there is very little overlap to match/correct anything. Maybe setting linear_update and angular_update quite low can do what you want (at the cost of computation).
add a comment
see more comments