
How KnowRob System Work ?!
Hi,
This question may seem easy, but I want to clearly develop a plan to my project in the coming period.
1- now I have RoboEarth and KnowRob worked at all :)
2- and I get a cloud point to a cup this cloud points can be converted to an OWL file
3- and I start with knowRob System from KnowRob Wiki.
I want to ask
((1)) How to integrate this object cloud points to KnowRob Knowledge base ?
((2)) from where I have to start to define this object properties and other objects that I will work with ?! , I know that this done in Protege OWL editor but, I have to define object properties, relations with each other, relations with its environment, commonsense knowledge, task action,detection and recognition algorithms Which one I have to do first ?!
((3)) Do I need household_objects_database ?!
In sum, How this system work ?!!!
(((4))) That is an object cloud points 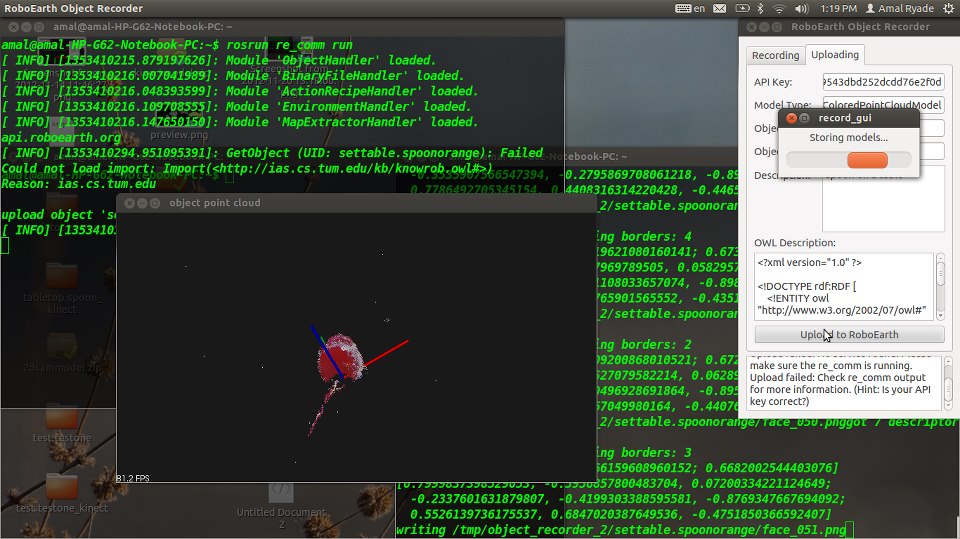
I take it using RoboEarth object recorder, The OWL description is created automatic and There was advice to not edit any thing in it. this owl describe the object
I do not understand well but this owl may extend knowrob.owl and roboearth.owl
1- How to load this to knowrob ?!
2- roboearth recorder can not detect this object I found that It can detect only
texture objects, and only one object in time. so if I use another package, how to get this OWL description ?!
3- what is the man function of knowrob.owl and roboearth.owl ?!
Thanks,
