
Global costmap disappears [closed]

Hi
I'm using the navigation stack for moving a robot. I use the AMCL for localizing the robot in the map, and the map_server for loading a reference map.
My problem is that the global costmap goes disappearing as the robot moves. So, sometimes, when I set a goal the robot cant find an optimal path because it has no reference map.
Here you have a picture of what it's happening:
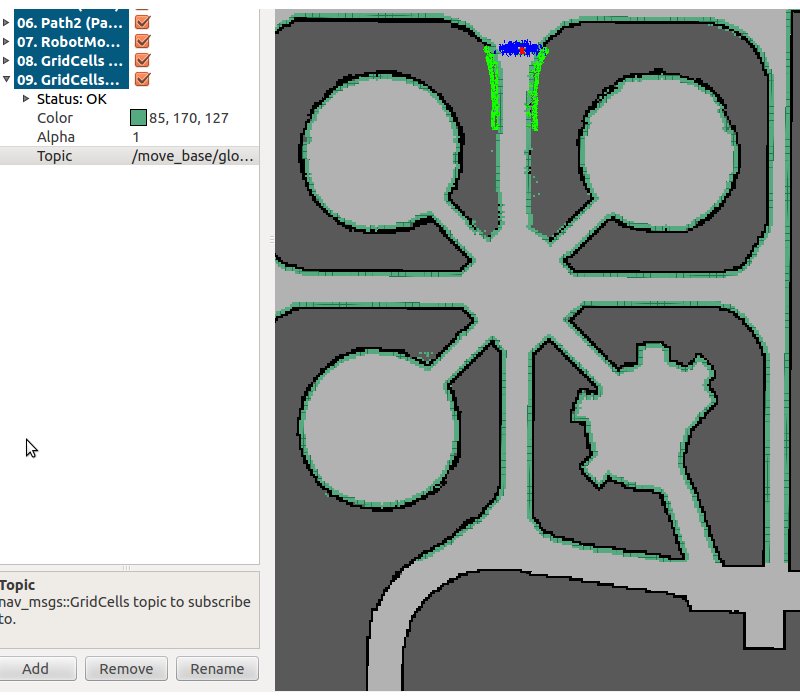
The dark green pixels are the global costmap, and the light ones the local costmap. Look at the bottom of the image: when the robot moves from the center to the top, this part of the map dissapears. And if the robot had moved from the center to the right, the left part of the map would have disappeared.
Here you have my global costmap configuration:
global_costmap:
global_frame: /map
robot_base_frame: /base_footprint
update_frequency: 5.0
static_map: true
resolution: 0.20
I don't know what can be happening. Can anyone help me?
I'm using Ubuntu 12.04 and ROS Fuerte
