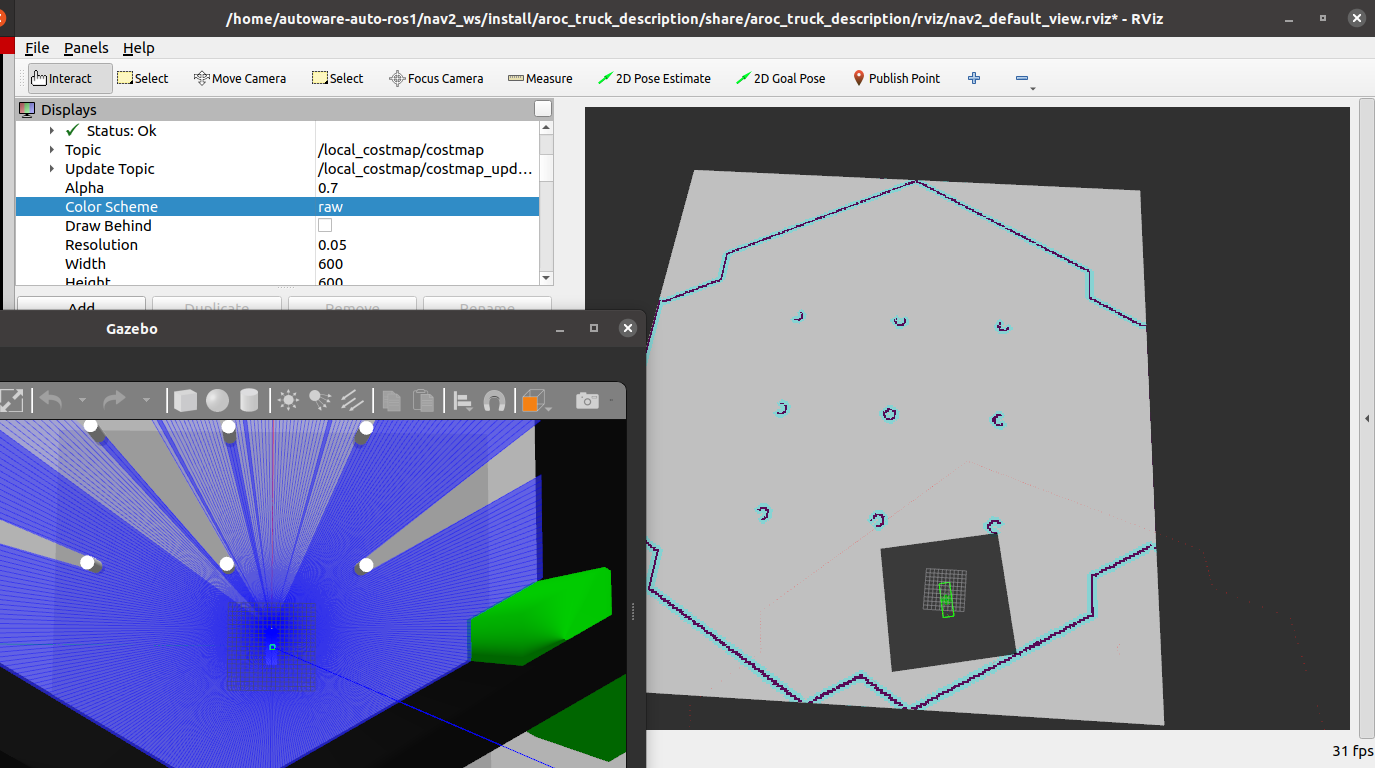
I've been experiencing a rather vexing issue with the localization and planning for my Ackermann type vehicle using Nav2. Initially, the problem seemed to be related to the particle size; however, upon changing the image resolution, I managed to get the size of particles similar to the turtlebot tutorial. Now, I'm beginning to suspect that the planning issue might be connected to the costmap and Lidar, as suggested by the repeated warnings I've received:
[rviz2-4] [INFO] [1684557117.532457854] [rviz]: Message Filter dropping message: frame 'odom' at time 18.718 for reason 'the timestamp on the message is earlier than all the data in the transform cache'
[controller_server-8] [WARN] [1684557117.542791989] [local_costmap.local_costmap]: Sensor origin at (4.15, -0.01 2.18) is out of map bounds (34.12, 29.97, 2.95) to (-14.95, -14.95, 0.00). The costmap cannot raytrace for it
9.98, 2.95) to (-14.95, -14.95, 0.00). The costmap cannot raytrace for it.
[controller_server-8] [WARN] [1684557296.342507914] [local_costmap.local_costmap]: Sensor origin at (4.19, 0.00 2.18) is out of map bounds (34.17, 29.98, 2.95) to (-14.95, -14.95, 0.00). The costmap cannot raytrace for it.
[controller_server-8] [WARN] [1684557296.542695295] [local_costmap.local_costmap]: Sensor origin at (4.19, 0.00 2.18) is out of map bounds (34.17, 29.98, 2.95) to (-14.95, -14.95, 0.00). The costmap cannot raytrace for it.
[controller_server-8] [WARN] [1684557296.742759887] [local_costmap.local_costmap]: Sensor origin at (4.19, 0.00 2.18) is out of map bounds (34.17, 29.98, 2.95) to (-14.95, -14.95, 0.00). The costmap cannot raytrace for it.
[controller_server-8] [WARN] [1684557296.942633179] [local_costmap.local_costmap]: Sensor origin at (4.19, 0.00 2.18) is out of map bounds (34.17, 29.98, 2.95) to (-14.95, -14.95, 0.00). The costmap cannot raytrace for it.
[controller_server-8] [WARN] [1684557297.142774081] [local_costmap.local_costmap]: Sensor origin at (4.19, 0.00 2.18) is out of map bounds (34.17, 29.98, 2.95) to (-14.95, -14.95, 0.00). The costmap cannot raytrace for it.
[controller_server-8] [WARN] [1684557297.342435994] [local_costmap.local_costmap]: Sensor origin at (4.19, 0.00 2.18) is out of map bounds (34.17, 29.98, 2.95) to (-14.95, -14.95, 0.00). The costmap cannot raytrace for it.
[controller_server-8] [WARN] [1684557297.542871713] [local_costmap.local_costmap]: Sensor origin at (4.19, 0.00 2.18) is out of map bounds (34.17, 29.98, 2.95) to (-14.95, -14.95, 0.00). The costmap cannot raytrace for it.
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
I I believe that there might be a misconfiguration issue with costmap parameters (size, height, width) as the Lidar is mapping correctly and localization appears functional. I am yet to find a solution for this
Update:
I've made some progress and managed to resolve the costmap issue. The solution involved using a static ... (more)