What link move_group get current pose refers to?
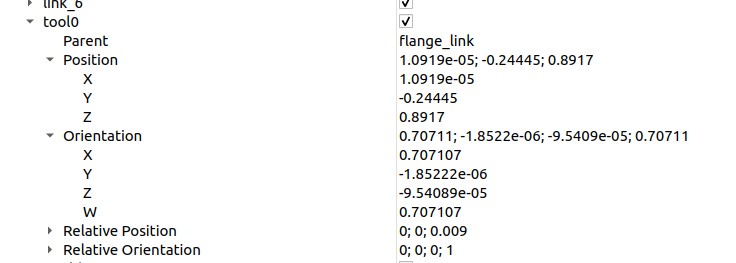
I have a Techman robot arm and I write a python script to read the current pose (pos : xyz, quar:xyzw) but I don't know if it's the base or end effector link that the position corresponds to. Anyone know how to check the link it corresponds to ? how to set which link I want to read ?
add a comment