
How to change the /tf topic message published in the data?
I use the MIT dataset to evaluate the gmapping algorithm, but the coordinate transformation maintained in the/tf topic published in the dataset is as follows:
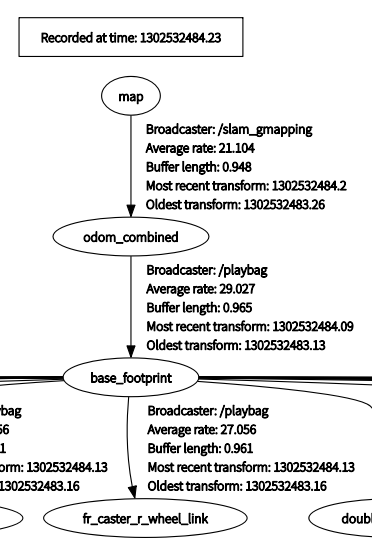
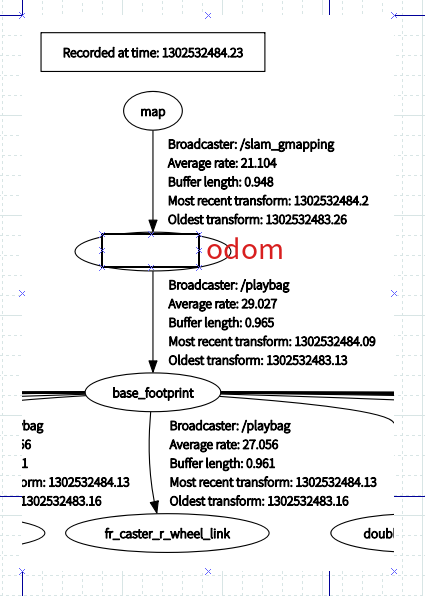
I need to use the original odom coordinate system to build /tf instead of odom_ combined. Known as topic/base_ odometry/odom releases the coordinate transformation of odom. Could you please release a new/tf topic, as shown in the figure below:
add a comment
