
robot_localization package: Test1 gives unexpected results.
Hi there, I am using robot_localization and runing the test1 as follows:
roslaunch robot_localization test_ekf_localization_node_bag1.test
I log two odometry positions:
/husky_velocity_controller/odom
/odometry/filtered When I plot them I find as follows:
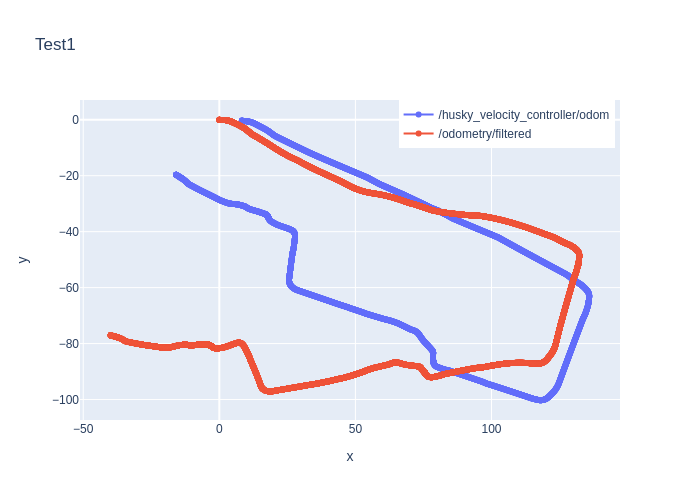
Is the '/odometry/filtered' corrected positions? It looks odd to me. What am I missing here?
Thanks in advance.
add a comment
