IMU sensor coordinates for EKF
Hi, I am using ekf to fuse multiple IMU. I was reading this portion
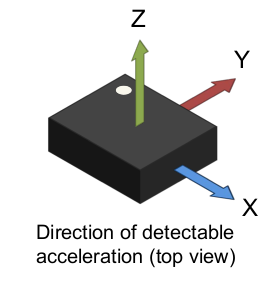
Measure +9.81 meters per second squared for the Z axis.
If the sensor is rolled +90 degrees (left side up), the acceleration should be +9.81 meters per second squared for the Y axis.
If the sensor is pitched +90 degrees (front side down), it should read -9.81 meters per second squared for the X axis.
1.Assume my robot is going 90 degrees vertically UPslope at 9.81m/s^2, my linear_accel.x will be 9.81x2? (gravity (+9.81) + forward acceleration (+9.81))?
2.Assume my robot is going 90 degrees vertically DOWNslope at 9.81m/s^2, my linear_accel.x will be 0? (gravity (-9.81) + forward acceleration (+9.81))?
add a comment