
rosserial subscriber callback is not getting triggered ?
I am able to see the subscriber subscribed to my topic in my pc. However when I try to publish data , I am not seeing any callback called in micro controller side. Below is my code
#include <mainpp.h>
#include <ros.h>
//#include <geometry_msgs/Twist.h>
#include <std_msgs/String.h>
#include <std_msgs/Float64.h>
#include <geometry_msgs/Twist.h>
#include <nav_msgs/Odometry.h>
#include "imu.h"
#include "data.h"
//void messageCb(const std_msgs::Float64& msg);
void messageCb(const nav_msgs::Odometry& msg);
ros::NodeHandle nh;
std_msgs::String str_msg;
geometry_msgs::Twist roscmd;
nav_msgs::Odometry stats;
extern union union_main sample_outdata;
extern volatile struct imu_akf imu_stat ;
ros::Publisher chatter("cmd_vel", &roscmd);
//ros::Subscriber listener ("odom",&stats);
char hello[] = "Hello world!";
//def quaternion_to_euler(orientation_q):
// (x, y, z, w) = (orientation_q.x,orientation_q.y,orientation_q.z,orientation_q.w)
// t0 = +2.0 * (w * x + y * z)
// t1 = +1.0 - 2.0 * (x * x + y * y)
// roll = math.atan2(t0, t1)
// t2 = +2.0 * (w * y - z * x)
// t2 = +1.0 if t2 > +1.0 else t2
// t2 = -1.0 if t2 < -1.0 else t2
// pitch = math.asin(t2)
// t3 = +2.0 * (w * z + x * y)
// t4 = +1.0 - 2.0 * (y * y + z * z)
/
/ yaw = math.atan2(t3, t4)
// return [yaw, pitch, roll]
ros::Subscriber<nav_msgs::Odometry> sub("odom", &messageCb);
void messageCb(const nav_msgs::Odometry& stats)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_SET);
// blink the led
// sample_outdata.realsense_data.translation_x = stats.pose.pose.position.x;
// sample_outdata.realsense_data.translation_y = stats.pose.pose.position.y;
// float t3 = +2.0 * ((stats.pose.pose.orientation.w * stats.pose.pose.orientation.z) + (stats.pose.pose.orientation.x * stats.pose.pose.orientation.y));
// float t4 = +1.0 - 2.0 * ((stats.pose.pose.orientation.y * stats.pose.pose.orientation.y )+ (stats.pose.pose.orientation.z *
stats.pose.pose.orientation.z));
// imu_stat.yaw.f
= atan2(t3, t4);
// if(msg.data > 1.0)
// {
// HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_0);
// }
}
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart){
nh.getHardware()->flush();
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){
nh.getHardware()->reset_rbuf();
}
void setup(void)
{
nh.initNode();
nh.advertise(chatter);
nh.subscribe(sub);
}
void loop(void)
{
chatter.publish(&roscmd);
nh.spinOnce();
}
I get the following error in terminal
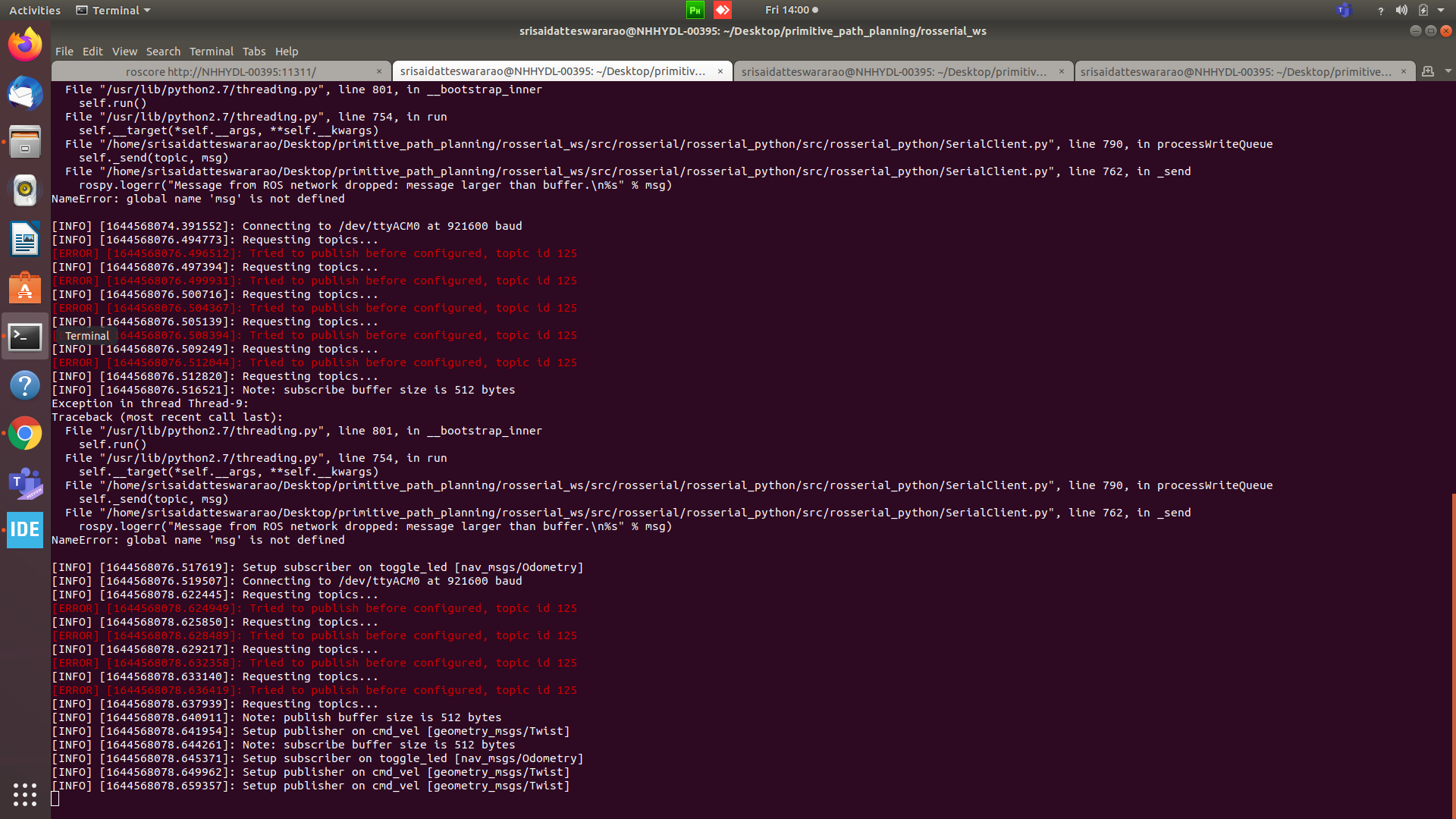
add a comment
