
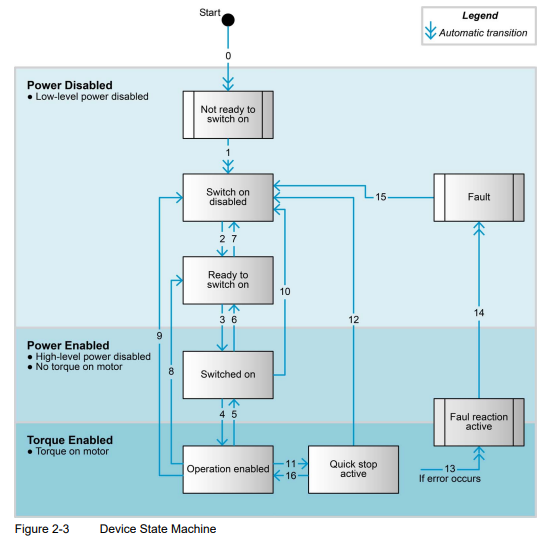
Change a device state via "0x6041 Controlword"
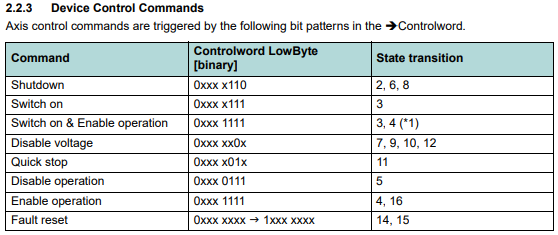
Hello, this question is a follow up of this question. After a successful initialization, the motor jumps to Operation enabled state and immediately transits to Switch On Disabled (transition 9) of unknown cause . The transitions are controllable via 0x6041 Controlword object in float format, for example, sending a command by following rosservice call should perform transition 3,4 and set the device to Operation Enabled.
rosservice call /artaban_motor/driver/set_object "node: 'front_left_joint_2_skelet_segment_upper'
object: '6041'
value: '591'
cached: true"
Unfortunately, the service with any Controlword value does not actually change a device state and is not reflected in Statusword change. Do I get this service functionality right? Is there any other way, how to force the device to change a state? I use Maxon Epos4 controller with IDX56M motor.


Would it be possible to document your answer in the first question as it looks you successfully resolved?