
How to change covariance of IMU sensor

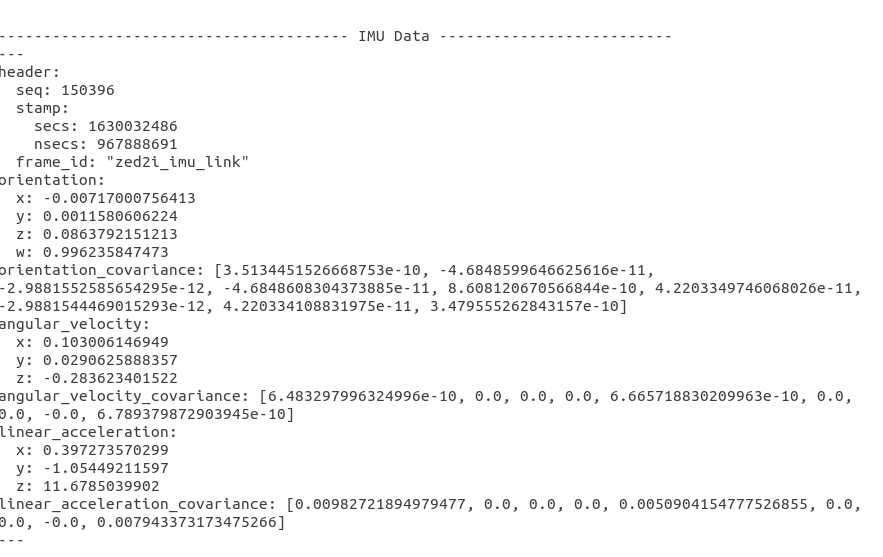
Hi, I am working on robot localization by using a robot localization package. I am fusing Odometry data and IMU data. The covariance of the data coming from the IMU sensor itself is very low. But, I know that IMU sensor measurements are faulty and I want to increase the covariance of IMU data. So that, IMU data would be given less weight (or importance) during localization. I am wondering what are the ways I can change the covariance of the IMU sensor data. I really appreciate it if some one help me with the issue. I have attached the sample IMU sensor output where you can see covariance values are almost zero.

Sort-of a duplicate: #q388934.
Thank gvdhoorn, I will have a look at it.