Hi @HuyBuiVN
Hi @HuyBuiVN I read your email and understand you can't make the picture public. You have made progress on rendering in Blender, so I will share my answer so other benefits as well.
Since you already have 3D rendering in Blender using openstreetmap, next I suggest to convert from Blender to Gazebo.
These are a couple links that might help you how to do this. It's not my expertise but I am sure you can figure it out.
https://github.com/david0429/blender_... https://prabhjotkaurgosal.com/create-...
Once you have the world in Gazebo, then you can research launching Gazebo worlds with ROS.
Gazebosim has many tutorials on how to do this: http://gazebosim.org/tutorials?tut=ro...
Finally once the world is launched in Gazebo, you can load your robot.



There are a few things you need to consider such as the scale of the image vs scale in Gazebo. Then one approach you can use is using opencv is to detect the lines in the map and convert them into blocks in gazebo. You will need to take into account the thickness of the wall for example.
Would it be possible to share a picture of the campus map just to help guide you with this. Also not a ROS question do perhaps check in the Gazebo forum
Check this package: https://discourse.ros.org/t/new-packa...
Hi osilva, thanks for your reply. I sent an email to you.
@HuyBuiVN, Can you please! share the map over here so it can be helpful for other members and can participate in this question.
I have given you enough credit to upload the images.
Thanks.
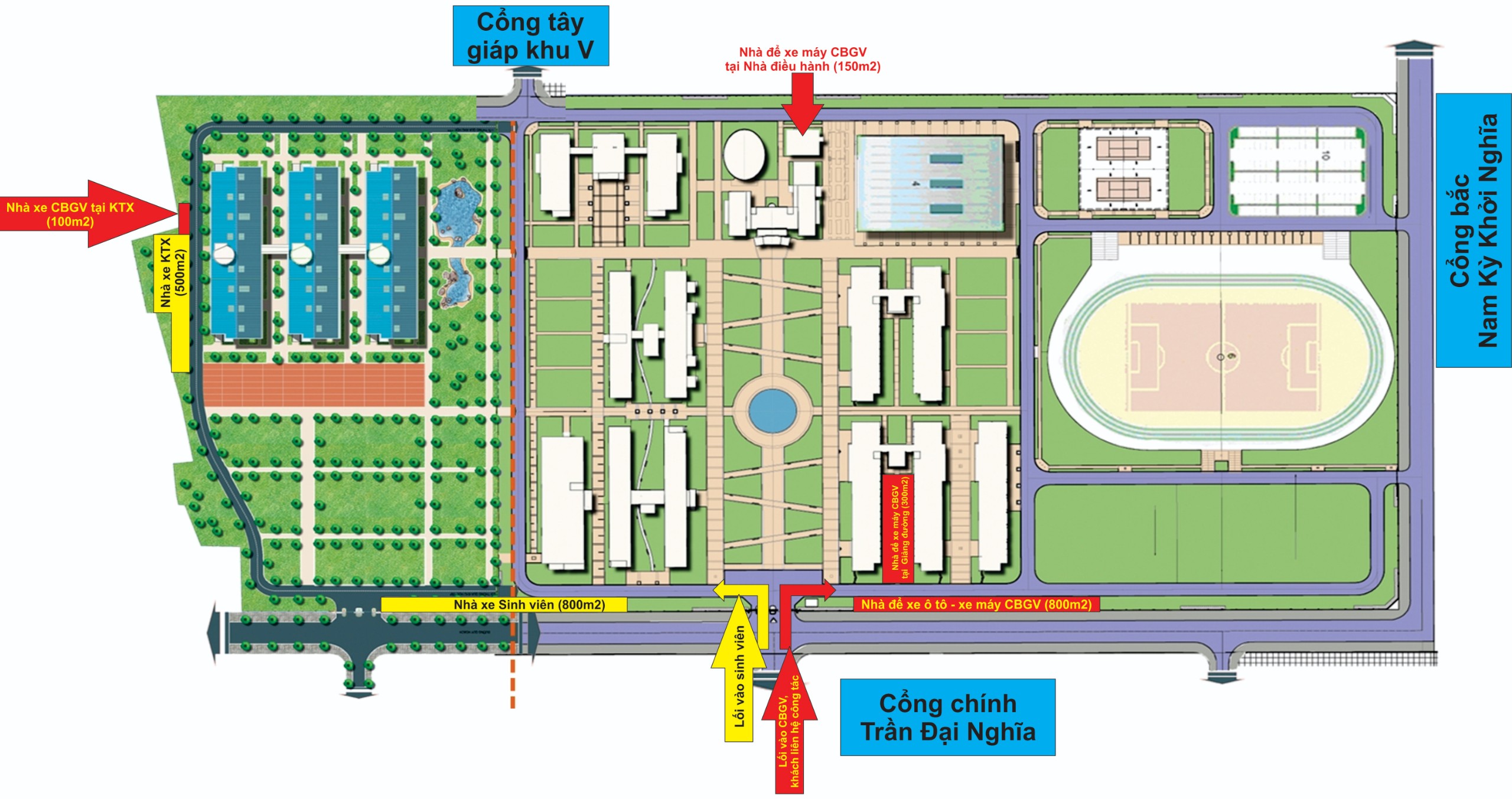
I have update my image, which i want to build a world to display in gazebo and put a model (robot car) on it.