gazebo camera frame is inconsistent with rviz + opencv convention

It looks like the gazebo camera frame convention is not the same as rviz and opencv, which the image below shows
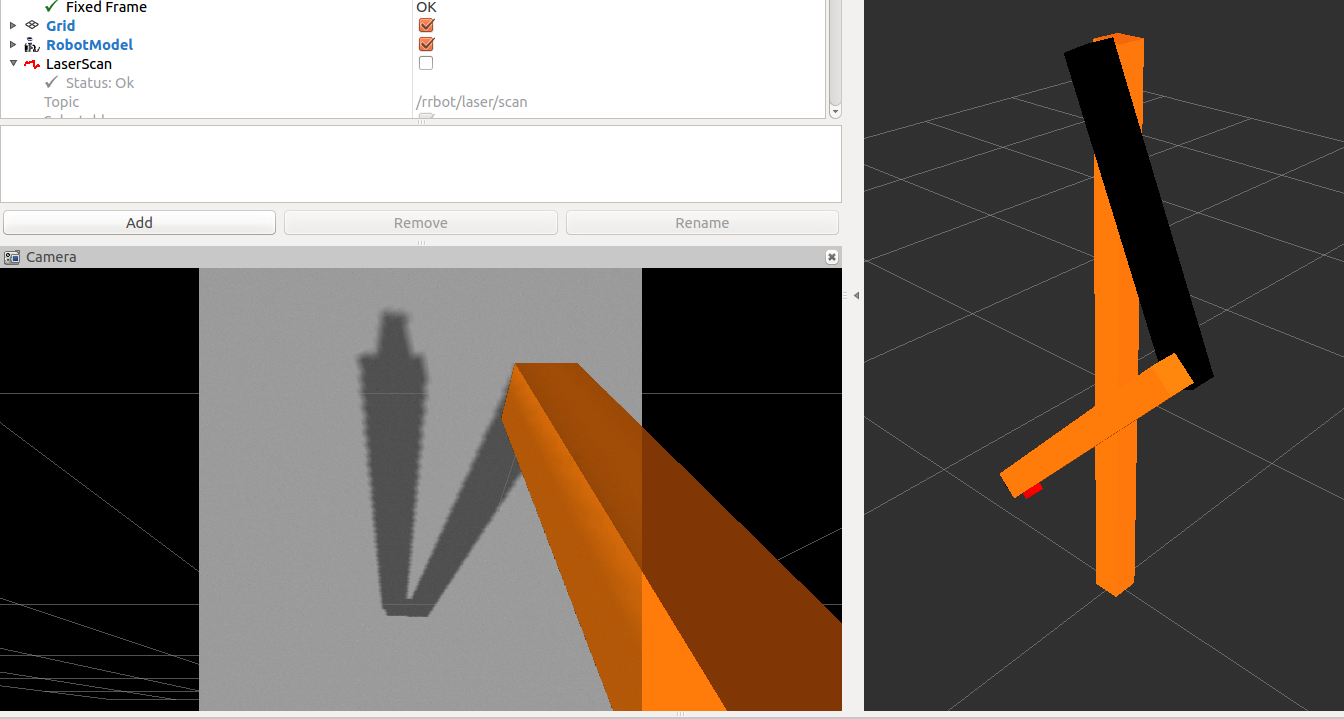
In opencv, z is pointing into the image (the blue axis), x is right (the red axis), and y is down (green axis), while in the gazebo camera x is pointing into the image and z is up, y is right which is similar to the robot convention of x being forward and z up.
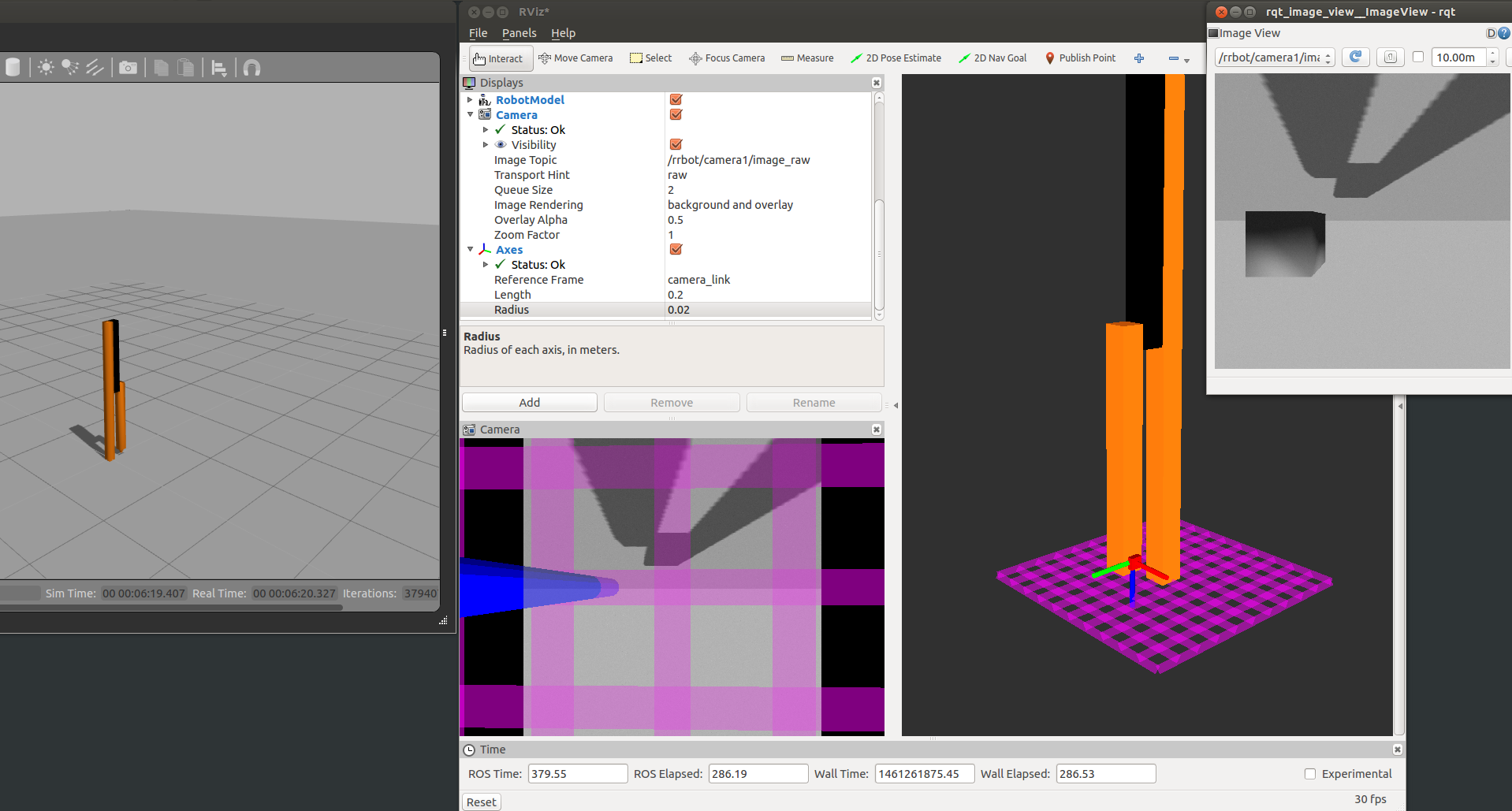
The image above is using an rviz/Camera to overlay the purple grid on the frame generated from the gazebo camera plugin, instead of the grid overlaying properly on the ground and going to toward the horizon rviz thinks the camera is pointed at the ground.
This example is running the gazebo_ros_demos rrbot_gazebo and rrbot_control launch files, and using standard Ubuntu 14.04 + Jade packages.
I cross posted https://github.com/ros-simulation/gaz... - or is it the fault of rviz/Camera and opencv, every node calling opencv camera projection functions should rotate first? Or every node on either side should have options to support either frame? (Or do options exist already and I've missed them?)
My short term solution is going to be to republish every frame out of gazebo with a rotated camera frame in the header (and the urdf/xacro can create the corrected frame, or it could be sent to tf from the same republishing node).