
Unable to transform object from namespaced frame 'ns/base_link' to planning frame 'base_link'

I have a two robot system that is prefixed in separated namespaces so each robot can work independently, but they exist in a single workspace in a connected tf_tree. I'm working in Linux 18 with ROS Melodic, C++.
I run separate move groups for each robot in their own namespace and run C++ code in the same namespace for each robot. Every time a path is planned, I get this warning in the move_group.launch terminal for every frame of the robot.
[ WARN] [1629361686.174205495]: Unable to transform object from frame 'ur5/base_link' to planning frame 'base_link' ("base_link" passed to lookupTransform argument target_frame does not exist. )
Each robot is namespaced and prefixed at launch, so the name base_link only exists in the .srdf's for each robot, but when executing the command move_group.getPlanningFrame() it displays base_link so I'm assuming, inside the namespace, the frames aren't namespaced and for some reason it's searching for them?
UPDATE
When computing a Cartesian path, I get a similar error
[ERROR] [1629898925.139134667]: TF Problem: "base_link" passed to lookupTransform argument source_frame does not exist.
[ERROR] [1629898925.139152001]: Error encountered transforming waypoints to frame 'base_link'
and that blocks code from being executed.
Are there any ways to prefix/namespace the planning frame, perhaps in code or any other ways to fix this?
UPDATE #2
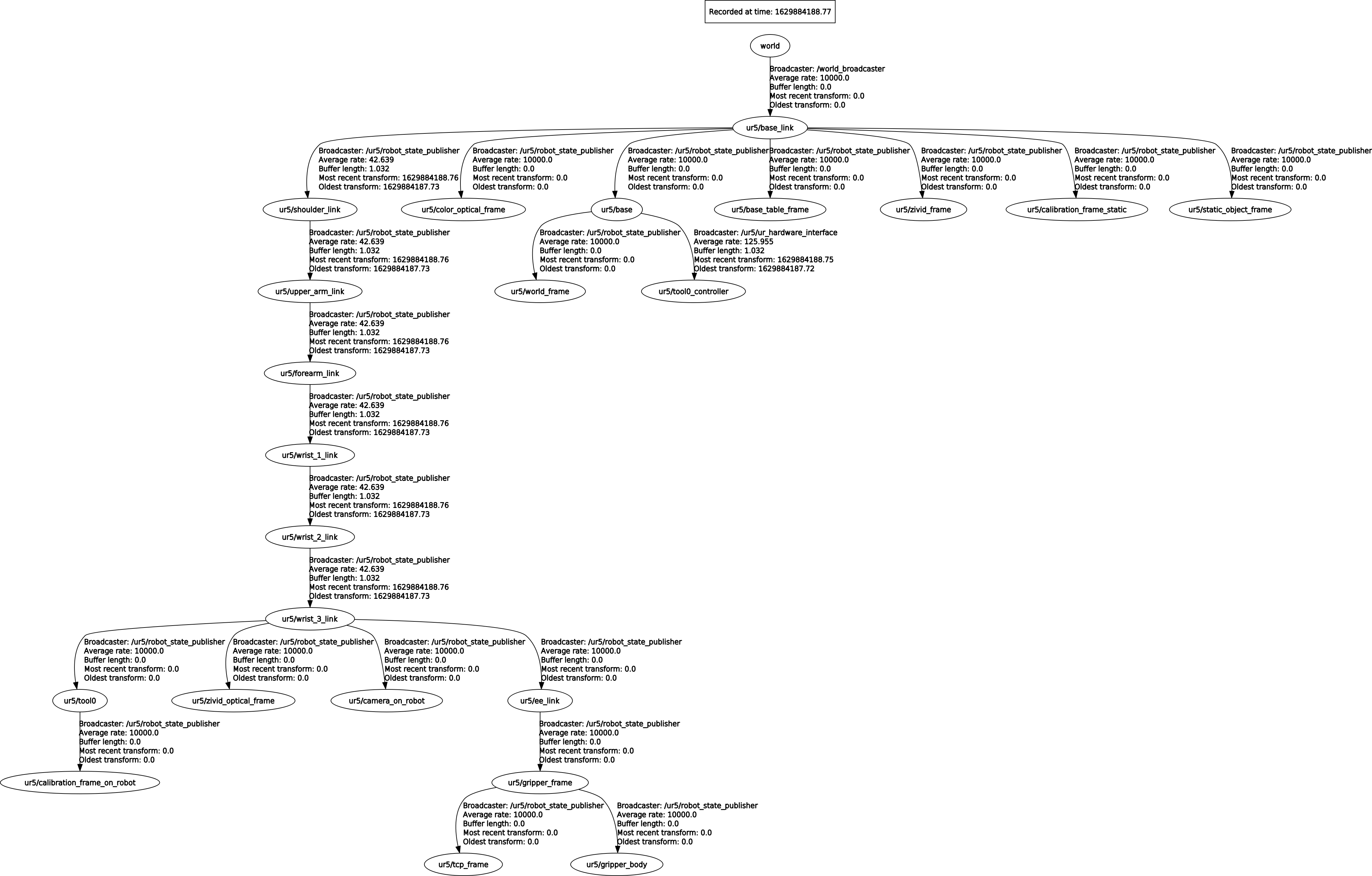
tf_tree (the second robots tree is the same, but with a different namespace, both connected by the world frame)
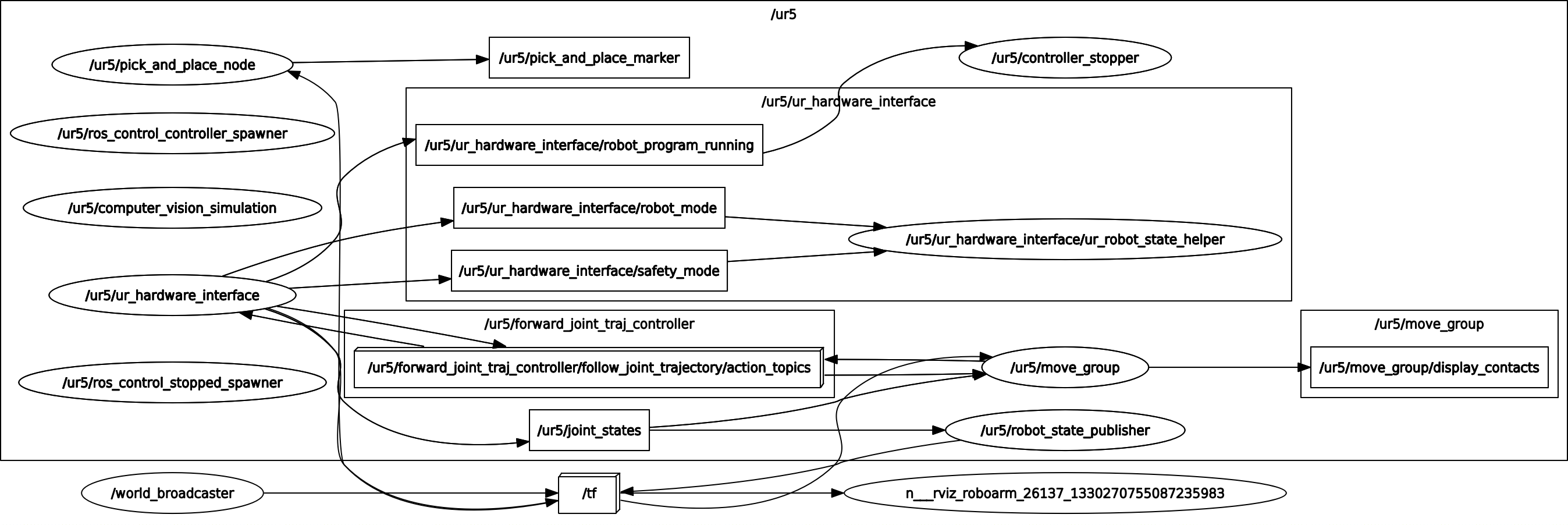
rqt_graph for the same setup

What's the output of
rosrun tf view_frames?@fvd I don't think I can add the tf_tree image, but the tree is connected and sort of looks like this:
the
worldframe is added by astatic_transform_publisherat ...setup.launch to connect the two namespaced robot tf_trees. As far as I know the problem might be that move_group is searching for base_link as the planner_id, but it should be looking for ur5/base_link.I upvoted your question so you should have enough reputation to upload the image. The planning frame might be an issue, yes.
I added tf_tree and rqt_graph output
The TF frames are not namespaced, so yes you should try setting your PlanningFrame to
ur5/base_linkdo you have any idea how to do that? As far as I know there is no setPlanningFrame in the c++ API and I can't find it in the launch files. But also, when I would launch the second robot, how would they connect if the TF frame were namespaced?
I went with a completely different solution for namespacing, where this question is no longer relevant, so I'm not sure if I should post it as an answer or not.
Surely that would be better than leaving the question unanswered.
Sorry for not answering your comment, by the way. I did not have a good response ready, and then I lost sight of this.