
static_transform_publisher broadcast wrong transfomation [closed]
Hi,
what is happening is really insane to me. I have set up two static broadcaster in my launch file:
<node pkg="tf" type="static_transform_publisher" name="my_broadcaster1" args="11.0 11.0 0 0 0 0 1 world odom 30" />
<node pkg="tf" type="static_transform_publisher" name="my_broadcaster2" args="10.0 10.0 0 0 0 0 1 world room 30" />
But my_broadcaster1 broadcast a transform between map and odom in place of world and odom. This is the tf_tree:
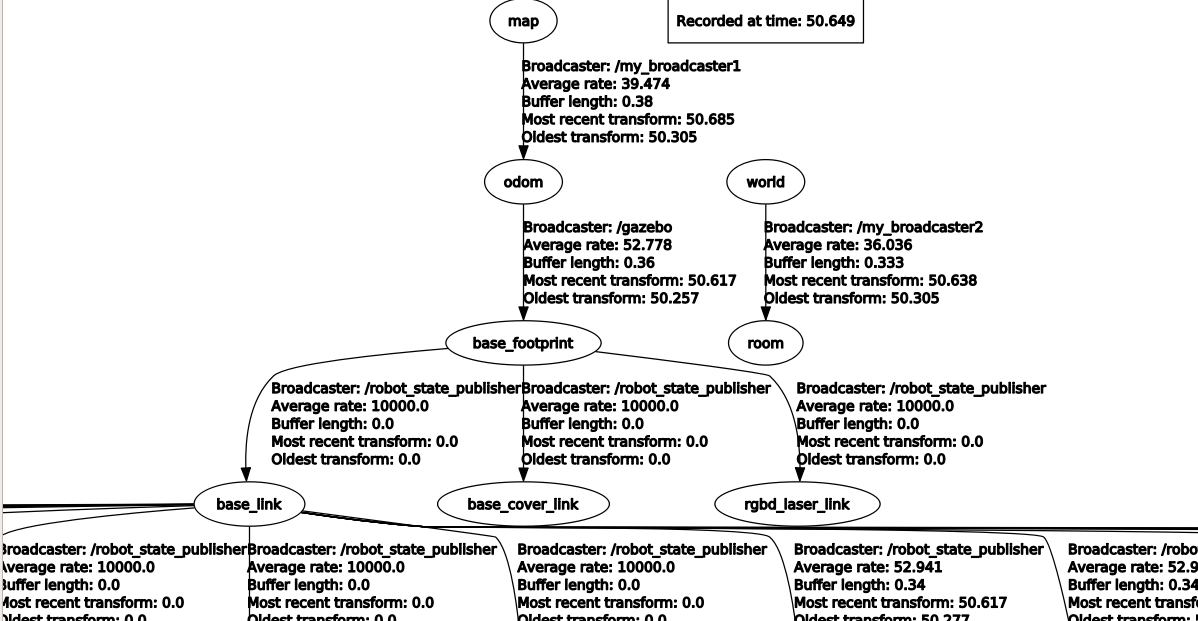
I really don't understand. If I don't launch the navigation stack, all works fine.
Closed for the following reason
the question is answered, right answer was accepted by
bach
close date 2021-06-05 02:50:08.564078
add a comment
