
Kinect color image and pointcloud data do not have matching orientations.
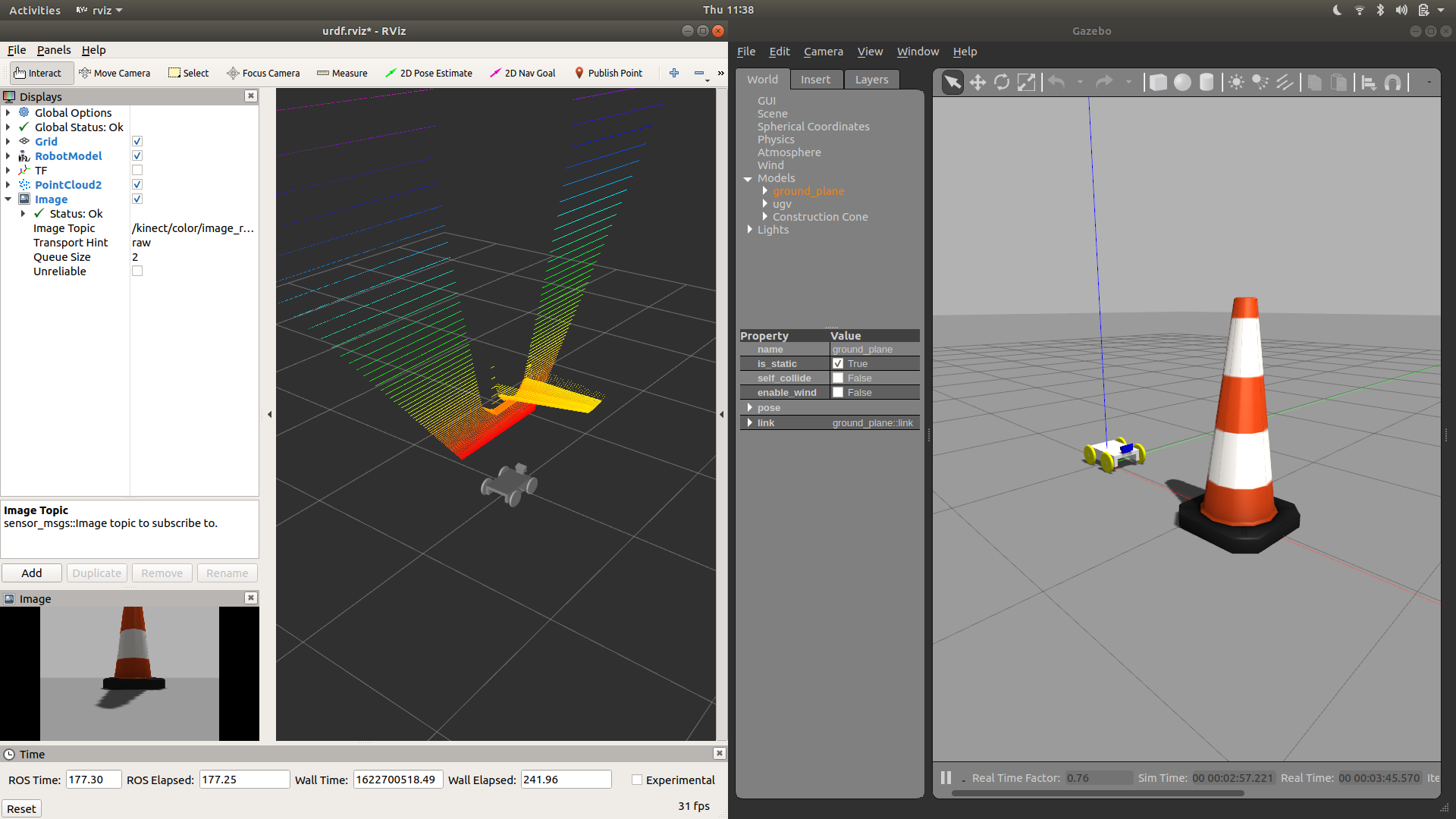
I have a simple 4 wheeled UGV running in gazebo with a kinect camera on top, that uses the kinect camera plugin from gazebo. It has teleop working, along with the color/image_raw being published propwerly. However, the pointcloud data seems to have an incorrect orientation when vizualized in Rviz, as seen below. How do I fix it ? The UGV and pointcloud image are perpendicular to each other.
add a comment
