
[WARN] Off Map Navigation_Stack
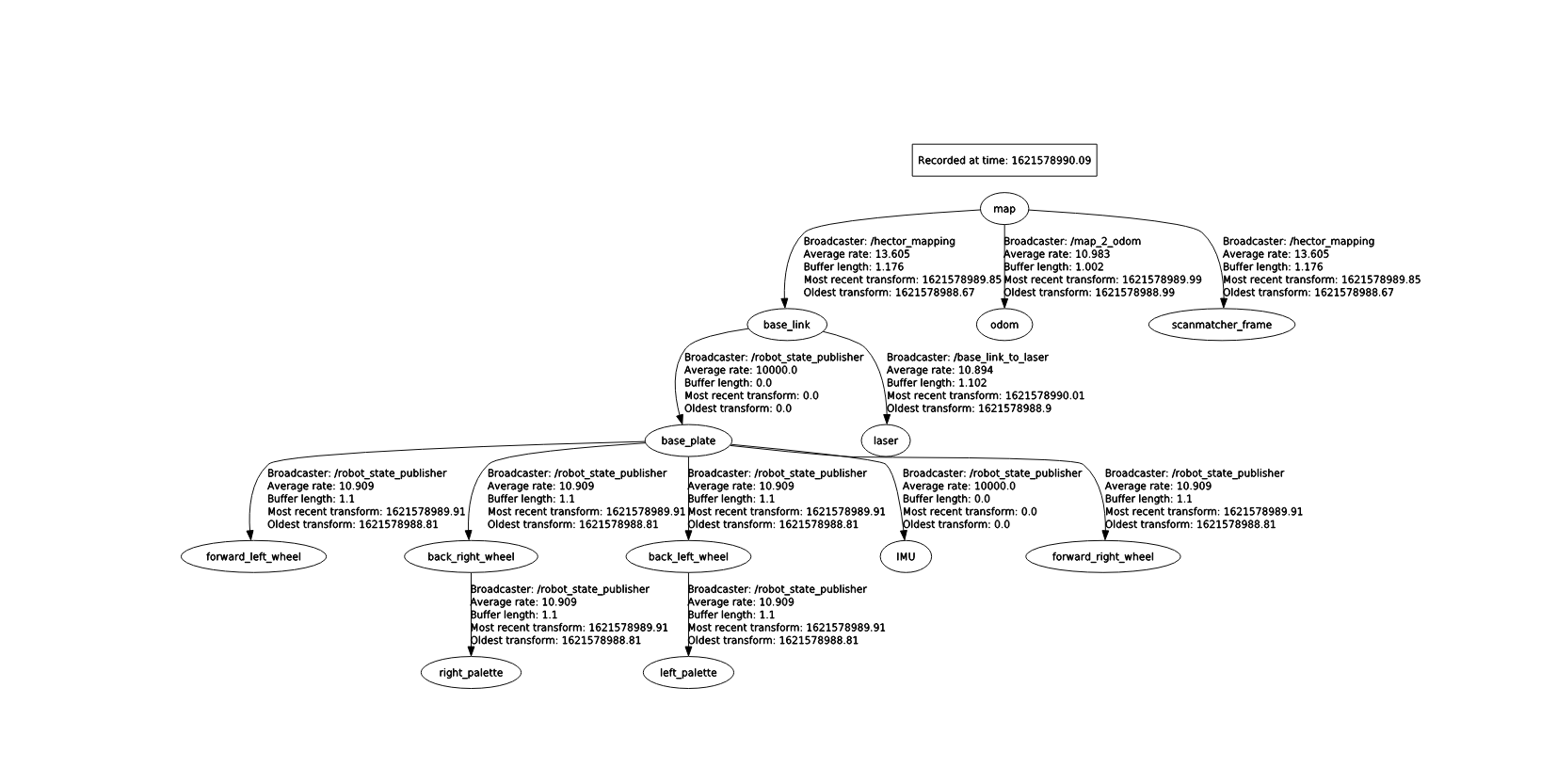
I'm trying to build an autonomous robot using hector_slam and navigation_stack. I don't have a saved map. maps in real time. It goes from one point to another very well. But when rrobot comes to the goal it turns around, does not stop. Even if I change the parameters "yaw_goal_tolerance" and "xy_goal_tolerance", the result is the same. What should ı do. I get an [WARN ]off map error while the program is running. Could it have something to do with it. So how should I solve. The picture of the error and tf_tree is in the link below.
add a comment

{kind=link}