
octomap_server problems [closed]
Hi all,
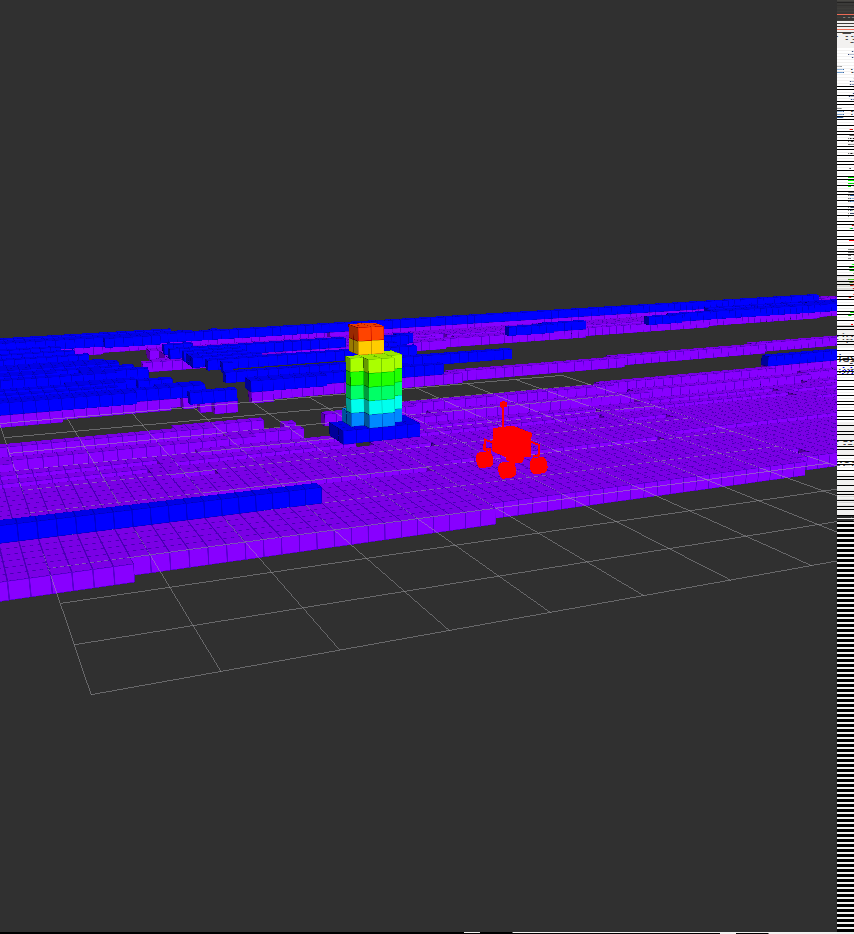
I simulate a robot in gazebo while it maps the environment using octomap_server. I have 2 questions regarding the visualization.
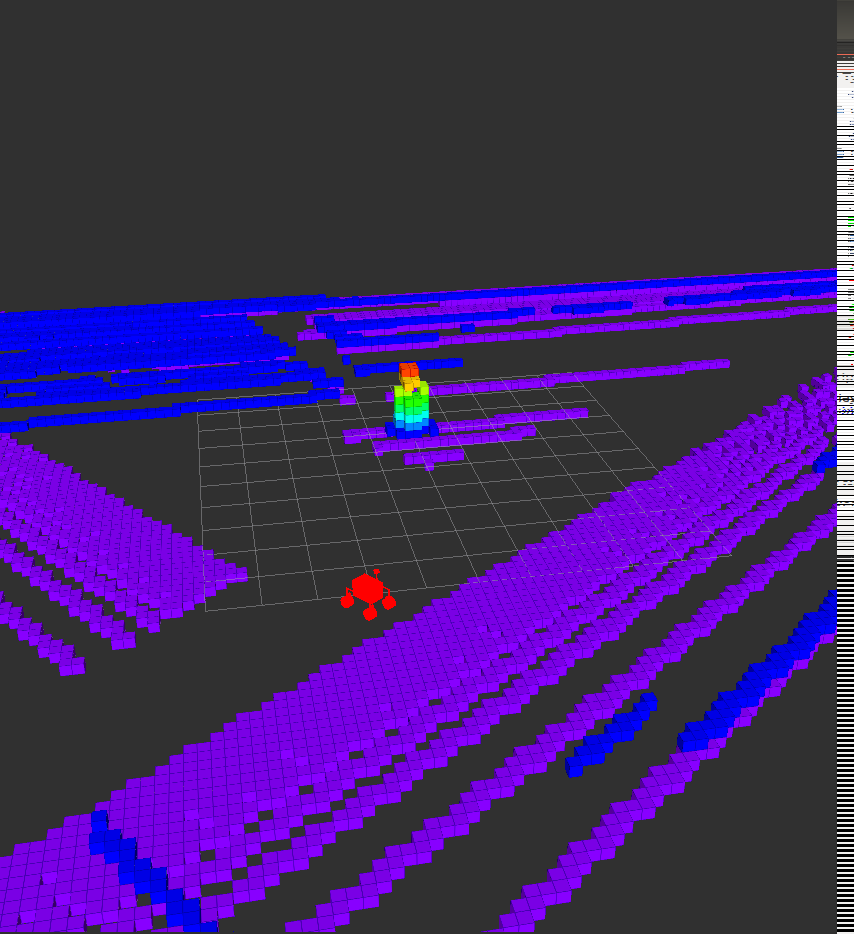
1) the mapped octomap cells get cleared after some time if the robot does not re-visit the area previously mapped. Why is this happenning?
2) why the colors of the octomap changing after a while?
Thank you
CS
########## Edit ##########
Running ROS-Groovy ros-groovy-octomap 1.5.4 ros-groovy-octomap-mapping 0.4.8 ros-groovy octomap-ros 0.2.6
The second image shows that areas previously filled had been removed after some time.
launch file
<param name="resolution" value="0.2" />
<param name="frame_id" type="string" value="/map" />
<!-- maximum range to integrate (speedup!) -->
<param name="sensor_model/max_range" type="double" value="30.0" />
<!-- data source to integrate (PointCloud2) -->
<remap from="cloud_in" to="/snapshotter/assembled_cloud" />
<param name="latch" type="bool" value="false" />
<param name="height_map" type="bool" value="true" />
<param name="sensor_model/[hit|miss]" value="0.9 / 0.1" />


What kind of sensor are you using, and where is is mounted?
@AHornung I am using a tilting laser similar to the one in PR2. It is mounted on a mast in the front (slightly visible in the first image).