
robot_localization: visual odom + imu + gps
I'm running into some challenges with my robot_localization setup. I have visual odometry from a ZED2, IMU and GPS from an xsens MTi-710.
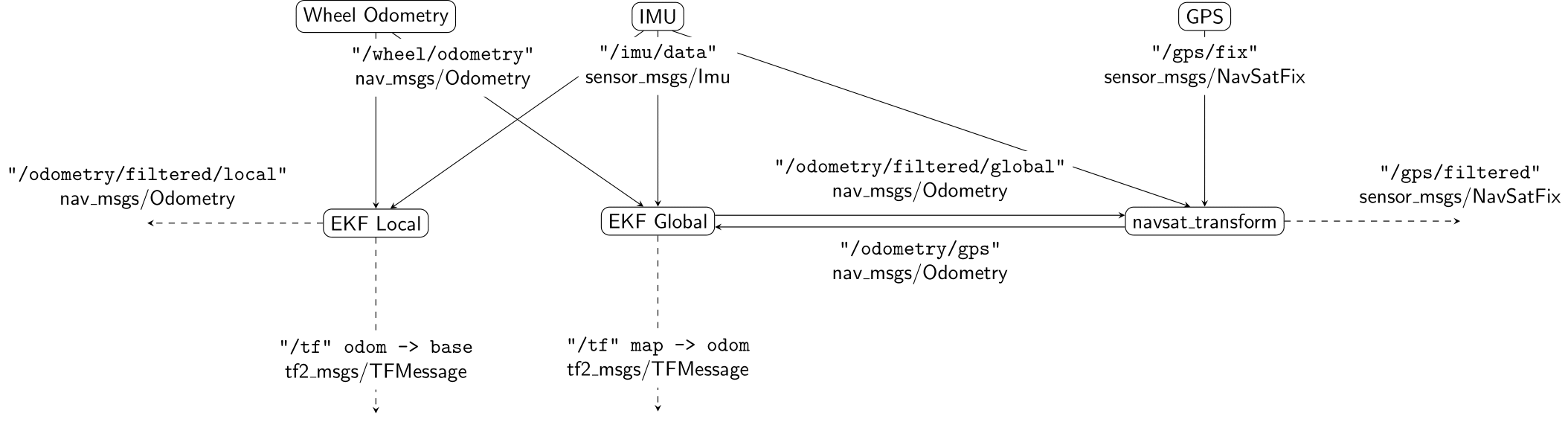
Goal: Configure my system as outlined in the navsat_transform_workflow diagram.
Problem: When just running the visual odometry and imu in a single ekf instance things work as expected. When adding in the second ekf instance and the navsat transform things go sideways. My map to odom transform goes haywire and I get warnings and errors. This is a benchtop implementation, so minimal movement from visual odom or imu. There is some noise on the GPS signal, but not as much as is showing up in the transform between odom and map.
Launch file:
<launch>
<arg name="svo_file" default="" /> <!-- <arg name="svo_file" default="path/to/svo/file.svo"> -->
<arg name="stream" default="" /> <!-- <arg name="stream" default="<ip_address>:<port>"> -->
<arg name="zed_node_name" default="zed_node" />
<arg name="camera_model" default="zed2" />
<arg name="publish_urdf" default="true" />
<arg name="camera_name" default="zed" />
<arg name="base_frame" default="base_link" />
<arg name="rviz_file" default="zed-rtabmap.rviz" />
<include file="$(find zed_wrapper)/launch/include/zed_no_tf.launch.xml">
<arg name="camera_name" value="$(arg camera_name)" />
<arg name="svo_file" value="$(arg svo_file)" />
<arg name="stream" value="$(arg stream)" />
<arg name="node_name" value="$(arg zed_node_name)" />
<arg name="camera_model" value="$(arg camera_model)" />
<arg name="base_frame" value="$(arg base_frame)" />
<arg name="publish_urdf" value="$(arg publish_urdf)" />
</include>
<include file="$(find xsens_mti_driver)/launch/display.launch" />
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_se_odom" clear_params="true"/>
<rosparam command="load" file="$(find robot_localization)/params/dual_ekf_navsat_qurrent.yaml" />
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_se_map" clear_params="true">
<remap from="odometry/filtered" to="odometry/filtered_map"/>
</node>
<node pkg="robot_localization" type="navsat_transform_node" name="navsat_transform" clear_params="true">
<remap from="odometry/filtered" to="odometry/filtered_map"/>
<remap from="gps/fix" to="/gnss"/>
</node>
</launch>
Parameters:
ekf_se_odom:
frequency: 30
silent_tf_failure: false
sensor_timeout: 0.1
two_d_mode: false
transform_time_offset: 0.2
transform_timeout: 0.2
print_diagnostics: true
debug: false
publish_tf: true
publish_acceleration: true
permit_corrected_publichation: false
predict_to_current_time: true
map_frame: map
odom_frame: odom
base_link_frame: base_link
world_frame: odom
odom0: /zed_node/odom
odom0_config: [true, true, true,
true, true, true,
false, false, false,
false, false, false,
false, false, false]
odom0_queue_size: 2
odom0_nodelay: false
odom0_differential: false
odom0_relative: false
odom0_pose_rejection_threshold: 5
odom0_twist_rejection_threshold: 1
pose0: /example/pose
pose0_config: [true, true, true,
true, true, true,
false, false, false,
false, false, false,
false, false, false]
pose0_differential: true
pose0_relative: false
pose0_queue_size: 5
pose0_rejection_threshold: 2 # Note the difference in parameter name
pose0_nodelay: false
imu0: /imu/data
# imu0: /example/imu_data
# The order of the values is x, y, z, roll, pitch, yaw, vx, vy, vz, vroll, vpitch, vyaw, ax, ay, az.
imu0_config: [false, false, false,
true, true, false,
false, false, false,
false, false, false,
true, true, true]
imu0_nodelay: false
imu0_differential: false
imu0_relative: false
imu0_queue_size: 5
imu0_pose_rejection_threshold: 0.8 # Note the difference in parameter names
imu0_twist_rejection_threshold: 0.8 #
imu0_linear_acceleration_rejection_threshold: 0.8 #
imu0_remove_gravitational_acceleration: true
use_control: false
process_noise_covariance: [Using default ...

First thing to do would be to check if there are any other sources that are publishing the same transformations that you are publishing with the ekf.
My guess is that the NaNs are coming from the GPS and that is were the problem must be.
Can you check how consistently
/odometry/gpsis being published?/odometry/gpsis being published at 4Hz pretty consistently until it crashes and then I get:I also noticed that in my tf tree, I lost the transform from map to odom and only have map to utm after the failure occurs. Is this due to the warning that I'm seeing?
Transform form map to odom should be published by
ekf_se_odom, try to see if this node is still running.The error you see can be ignored as
imutobase_linkshould remain constant throughout.Are you using these parameters per chance?
Check this link for proper setup instructions if you have not already.
One quick check could also be to use the
ukfin the package. I believe you can use similar params (if not identical) to use the nodes.