
Hector slam configuration issues
I am changing my project from using gmapping to hector slam but in rviz my robot is displaying and moving in a less than stable manner, as shown below. I've run out of ideas on things to try;
Teleoperating the robot is even worse :
I have the following error on my command-line :
[ERROR] [1616948938.487207485, 0.535000000]: Transform failed during publishing of map_odom transform: Lookup would require extrapolation into the past. Requested time 0.030000000 but the earliest data is at time 0.205000000, when looking up transform from frame [chasis] to frame [odom]
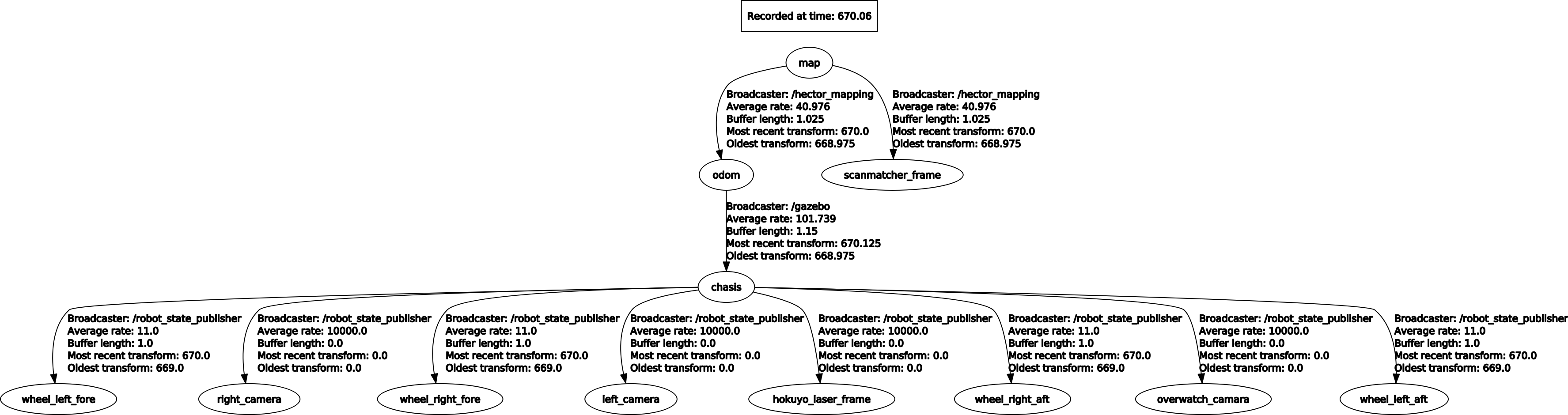
My TF tree hierarchy is fully connected as shown below :
I have hokuyo lidar setup in my xacro as follows:
<!-- HOKUYO as RPLIDAR -->
<xacro:hokuyo_utm30lx name="hokuyo_laser" parent="chasis" ros_topic="hokuyo_scan" update_rate="40" ray_count="1040" min_angle="130" max_angle="-130">
<origin xyz="0 0 0.3" rpy="0 0 0" />
</xacro:hokuyo_utm30lx>
And my hector related configuration in my launch file is as follows :
<arg name="tf_map_scanmatch_transform_frame_name" default="scanmatcher_frame"/>
<arg name="base_frame" default="chasis"/>
<arg name="odom_frame" default="odom"/>
<arg name="pub_map_odom_transform" default="true"/>
<arg name="scan_subscriber_queue_size" default="5"/>
<arg name="scan_topic" default="hokuyo_scan"/>
<arg name="map_size" default="2048"/>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="map_frame" value="map" />
<param name="base_frame" value="$(arg base_frame)" />
<param name="odom_frame" value="$(arg odom_frame)" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<param name="pub_map_odom_transform" value="$(arg pub_map_odom_transform)"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.050"/>
<param name="map_size" value="$(arg map_size)"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="map_multi_res_levels" value="2" />
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.9" />
<param name="map_update_distance_thresh" value="0.4"/>
<param name="map_update_angle_thresh" value="0.06" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="$(arg scan_subscriber_queue_size)"/>
<param name="scan_topic" value="$(arg scan_topic)"/>
<param name="tf_map_scanmatch_transform_frame_name" value="$(arg tf_map_scanmatch_transform_frame_name)" />
</node>
<node pkg="tf" type="static_transform_publisher" name="map_nav_broadcaster" args="0 0 0 0 0 0 odom chasis 100"/>
My hector-slam knowledge is a work-in-progress so I would appreciate some help in understanding what's wrong with my configuration. I'm happy to provide more code if it would help.
add a comment
