
PR2 sees ghost obstacles in tilting laser

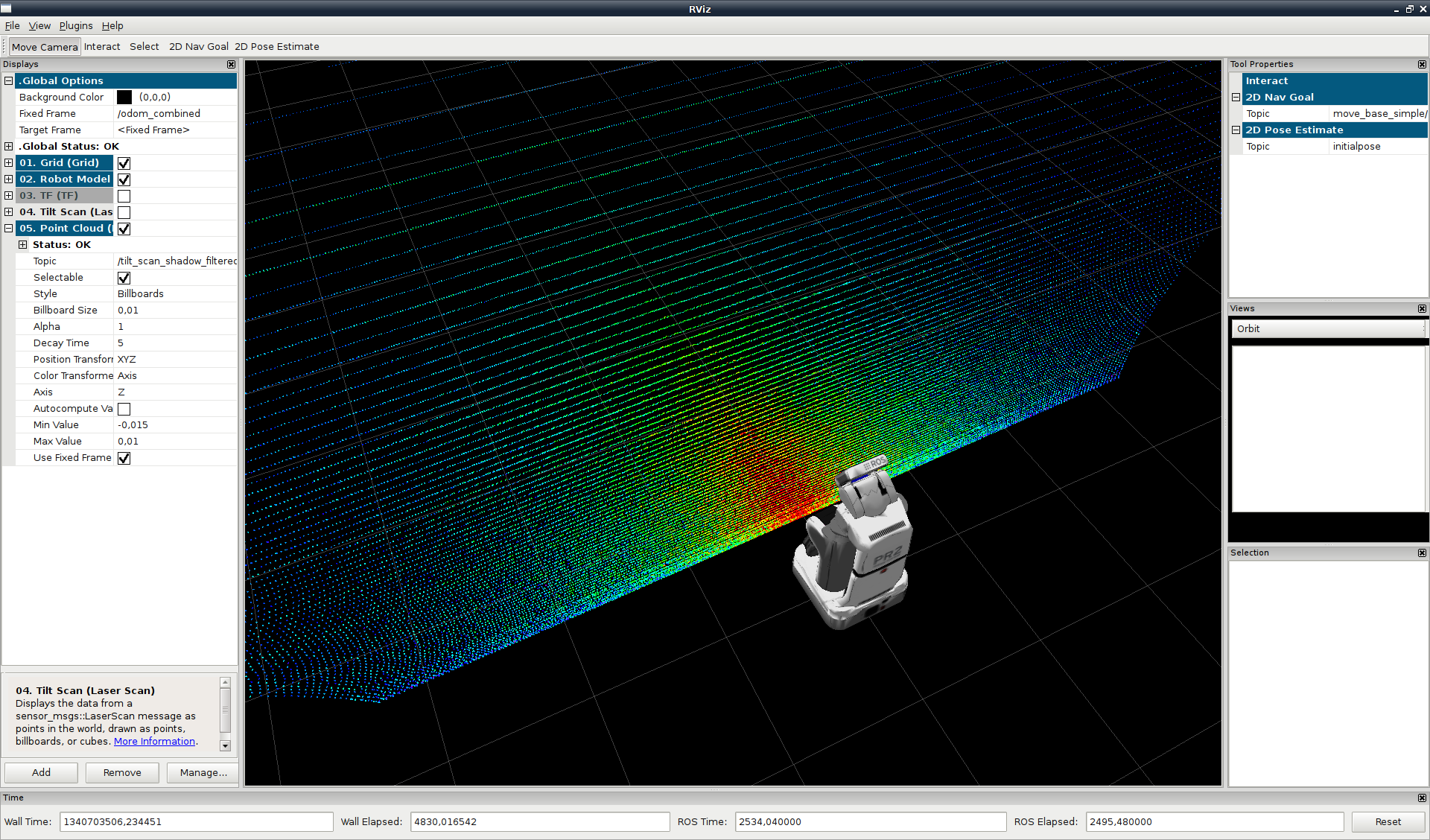
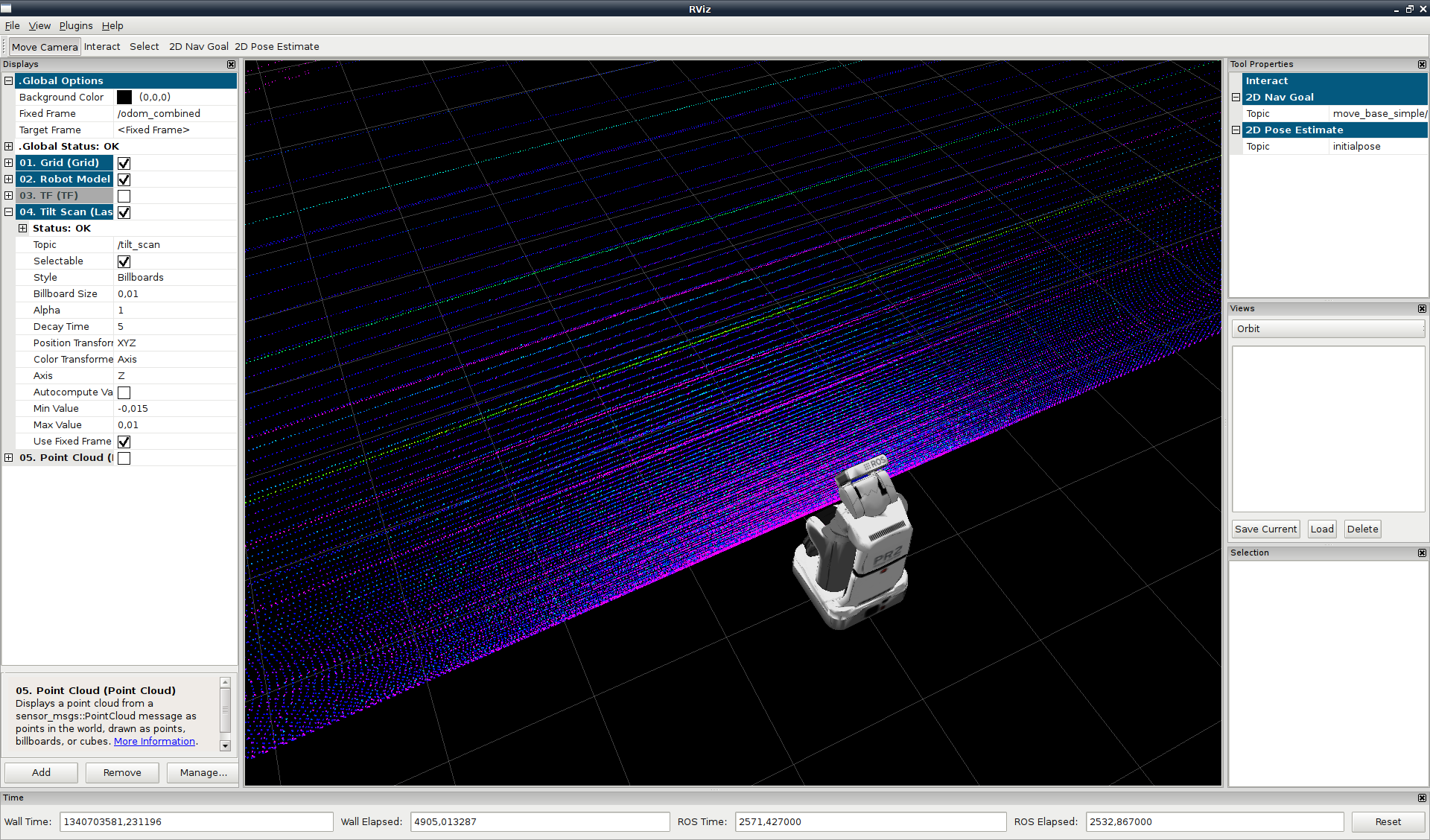
A PR2 I've been working with a while ago has the problem that the tilting laser reports erroneous obstacles to the right and left of the robot, which leads to "ghost obstacles" and messes up navigation. The problem can be seen in the following screenshot:
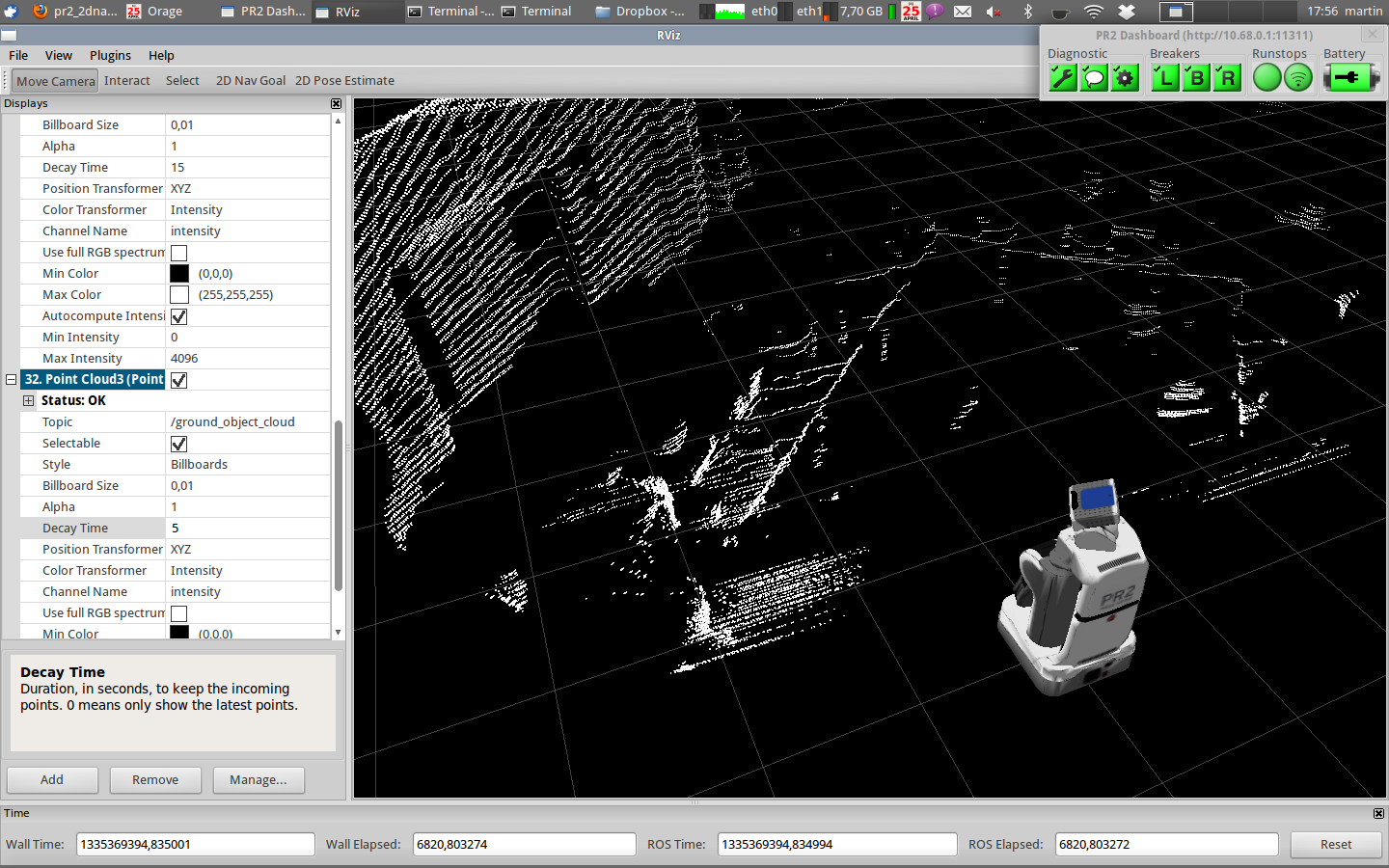
Note the straight lines on the ground to the right and left of the PR2. They seem to lie above the ground, so they are not caught by the ground removal. The further the points are from the robot, the higher above the ground they are. It looks as if the Hokuyo reported not a straight line, but a bent one.
Did anybody else see this problem? Any idea what went wrong?
Here's some more pictures:

Resulting problems in navigation caused by the straight-line artifacts

A photo of the actual scene. The ground here is pretty cluttered, but the same problem exists when there is nothing on the ground at all.


I don't have a solution but I can tell you that I've seen similar behavior on multiple other PR2s.