
Slam Toolbox detects change of position in Gazebo
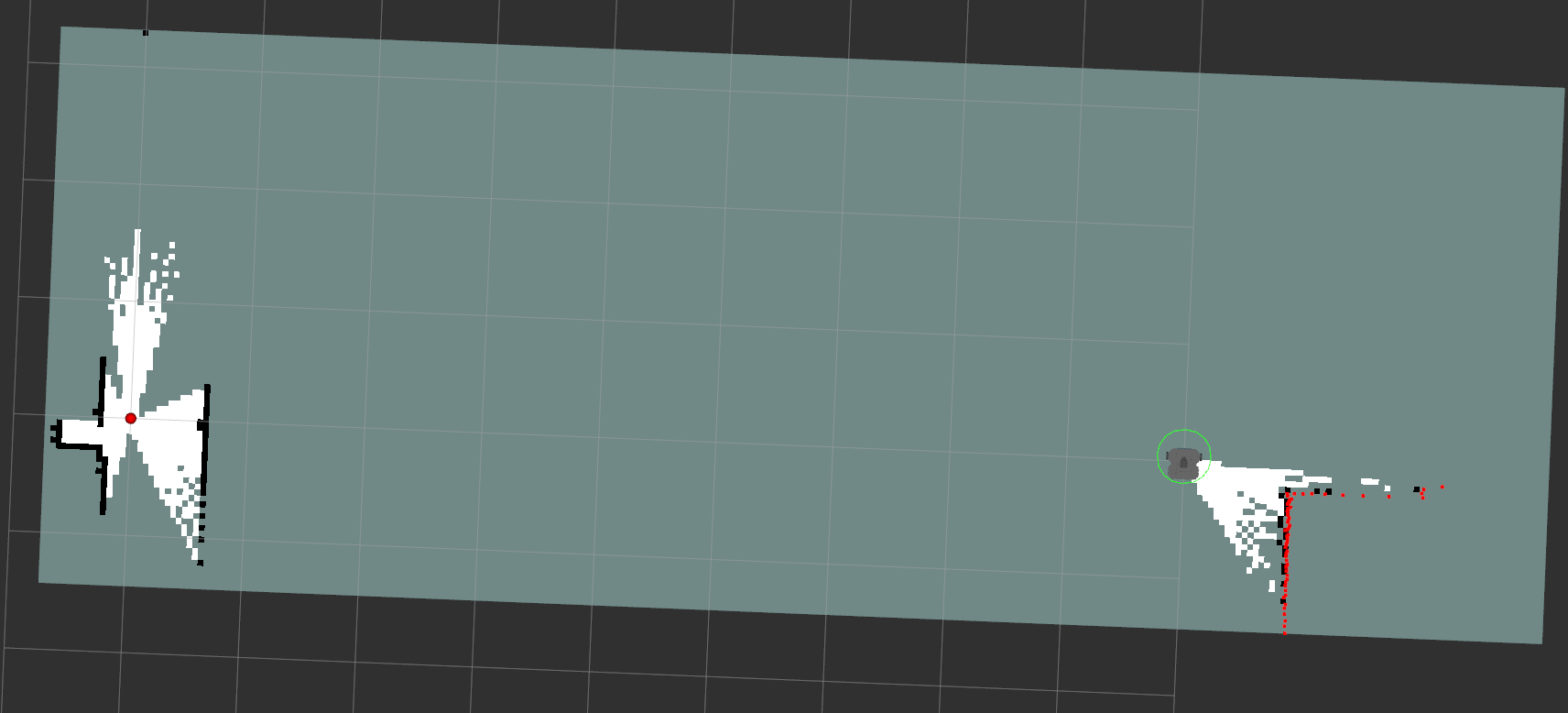
I am currently using the SLAM toolbox with the Turtlebot3 in a Gazebo simulation (see Navigation Tutorial). I have changed the position of the robot in Gazebo (changed the pose in the gui). So that the robot jumps through the room. According to my understanding the SLAM toolbox should not notice that the pose has changed. But I noticed in Rviz that the SLAM toolbox knows exactly where it jumped to. See picture (left original pose; right pose where the robot jumped to):
My question is whether I have misunderstood and the SLAM toolbox uses the position of Gazebo. In a real application this is not possible.
Thank you for your Answer.
Additional information: ROS Version: ROS Foxy SLAM algorithm: SLAM Toolbox Navigation2 Stack
add a comment
