Hi,
Since there are no new releases for noetic of the hector_quadrotor publishers, what you need to do in order for that simulation to work is to make the migration yourself. It's a lengthy and tedious process, but it can be done. What you need to do is to clone the latest version of the hector_quadrotor package in your worskpace, and attempt to compile it. This will give you errors, and there are ways to tackle those errors and make the modifications in the code. I recommend this migration guide:
https://github.com/osrf/gazebo/blob/g...
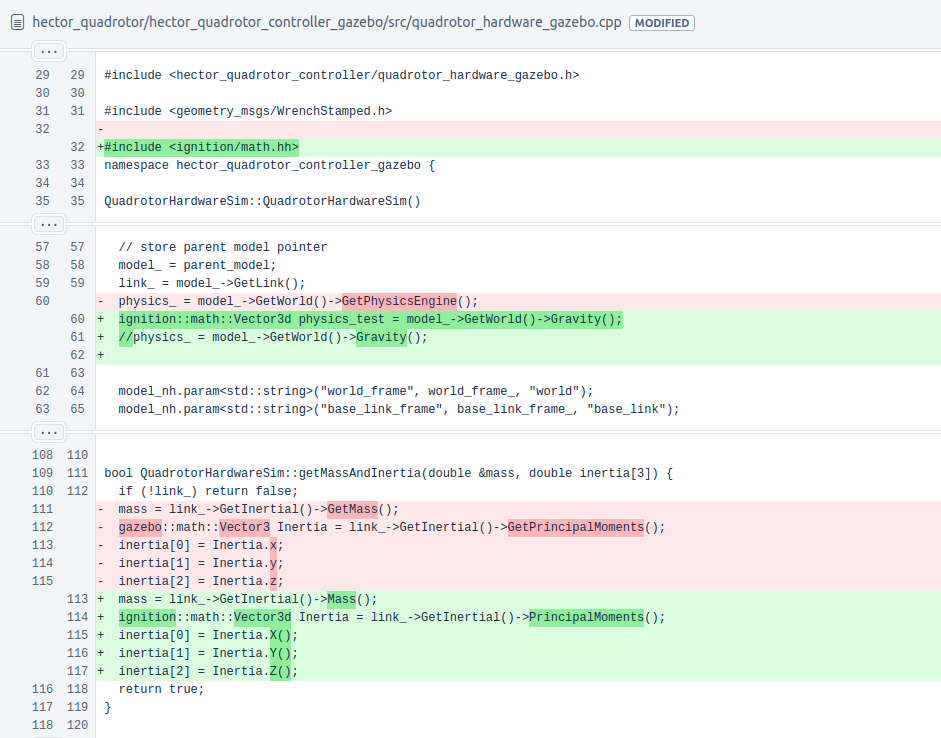
Which tackles the changes that must be done for the new Gazebo release. I can tell you now that the most common error can be fixed by the replacement of an old library, gazebo::math, for ignition::math, and changing the needed function as the migration guide indicates. Here's an example in a particular file needed to launch the simulation:
If you get stuck while attempting the migration, I made this video that can help you in the process:
https://www.youtube.com/watch?v=qJ9v1...
Good luck!