
Unable to localize successfully after launching amcl
Hello there,
After generating the map and launching amcl my robot couldn't localize successfully. I am not sure if the odometry plays a role in that problem.. any help will be appreciated!
Thank you!


Can you please provide the output of
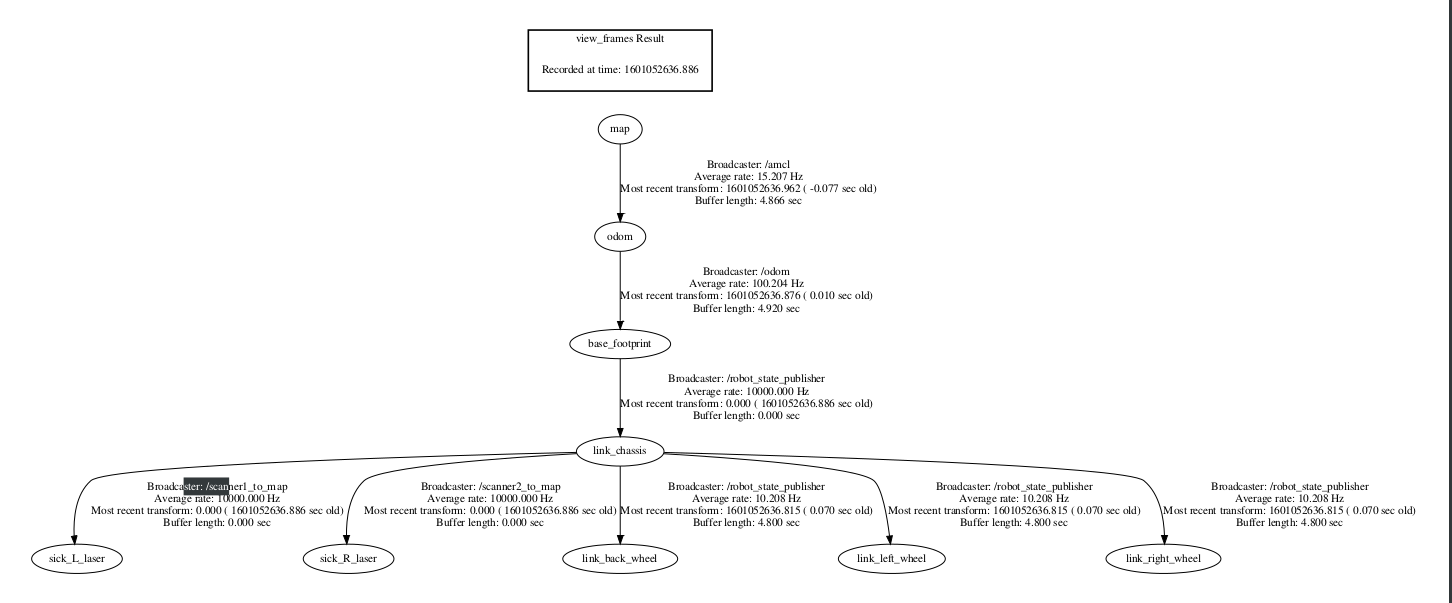
rosrun tf view_framesand any error messages you are getting please? This question is impossible to solve without more detail, please provide as much useful information as you can.Yes of course!
Do you see how your
map_serveris not connected to anything? That usually should be publishing the/maptopic whichamclneeds to have to be able to properly localize on the map. Troubleshoot why that is happening.