
The small car in gazebo idled , but /cmd_vel had receive msg.

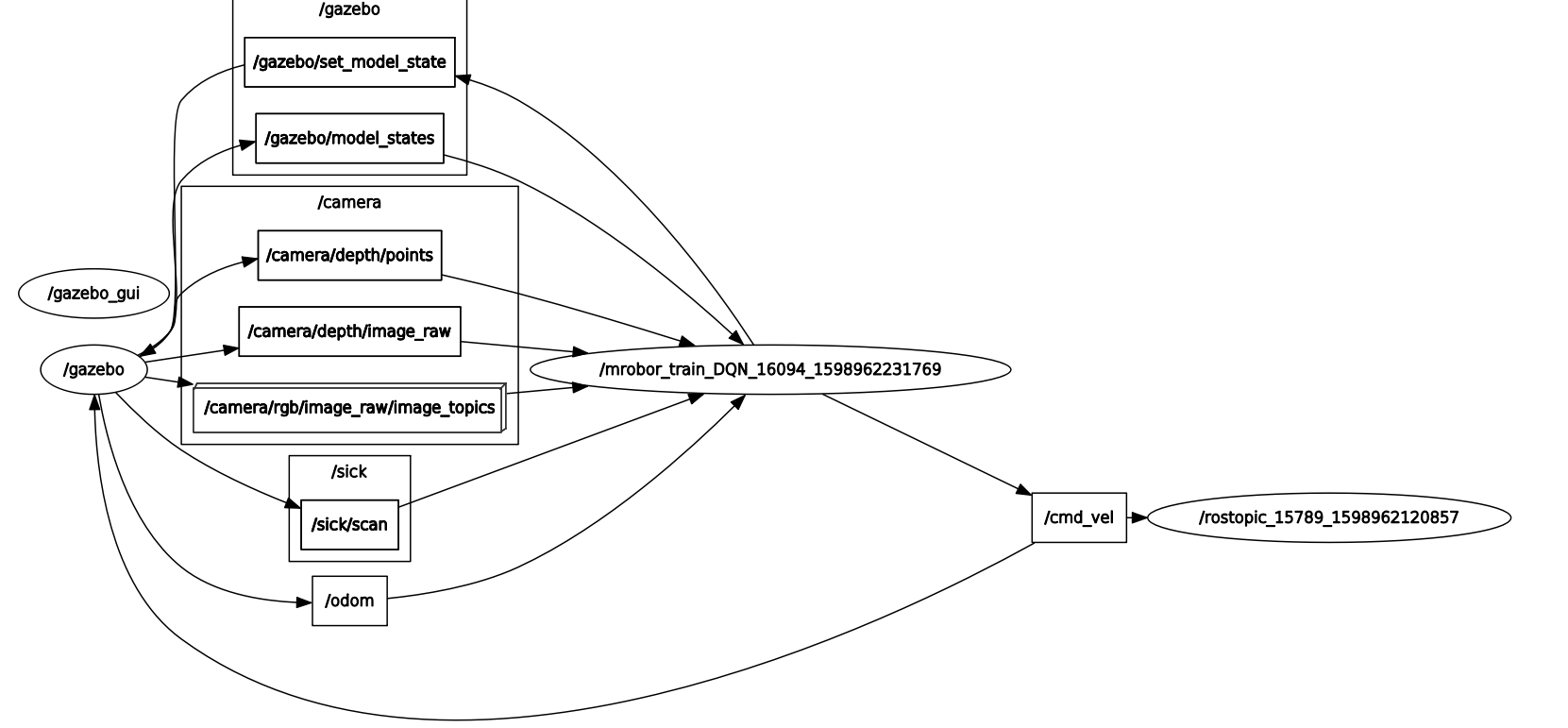
The tires are rotating, but the small car don't move.
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Hi @Tonnwu,
I will just refer to my answer here since it seems you have the same problem.
You may want to check and tune the Gazebo contacts of the robot wheels. The wheel contacts parameters need to be properly adjusted for Gazebo to produce consistent contact and friction values to allow the robot to be moved by the simulated forces.
The most important friction factors are mu1 and mu2 that are usually between [0,1], and then Kp and Kd that increase the stability of the contacts/simulation.
With those changes you will be able to see the robot moving.
Hope that helps.
Regards.
Hi @Weasfas, Thanks your reply, I checked my srf file , the fraction is 0.8 . Then i 'run rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.3, y: 0, z: 0}, angular: {x: 0, y: 0, z: -1}}' in shell, the car will move. Then i commit the ode_config in main code ,all are right.
Asked: 2020-09-01 07:28:50 -0500
Seen: 176 times
Last updated: Sep 01 '20
How to setforce at a constant interval? [closed]
Can wait_for_service bring up a service?
Cannot connect MoveIt with Gazebo
TF vs TF2 (lookupTwist vs lookup_transform)
ROS_IPV6 On gives error Failed to contact master
How do I set up a baxter robot?
How to add third person follower in librviz.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.