
Global costmap becomes distorted after resizing itself
Dear all,
I am running the Navigation stack with Cartographer SLAM, and am having an issue where the global costmap gets distorted after resizing itself automatically. For example, here is the output after I launch move_base:
/map topic from Cartographer SLAM appears fine
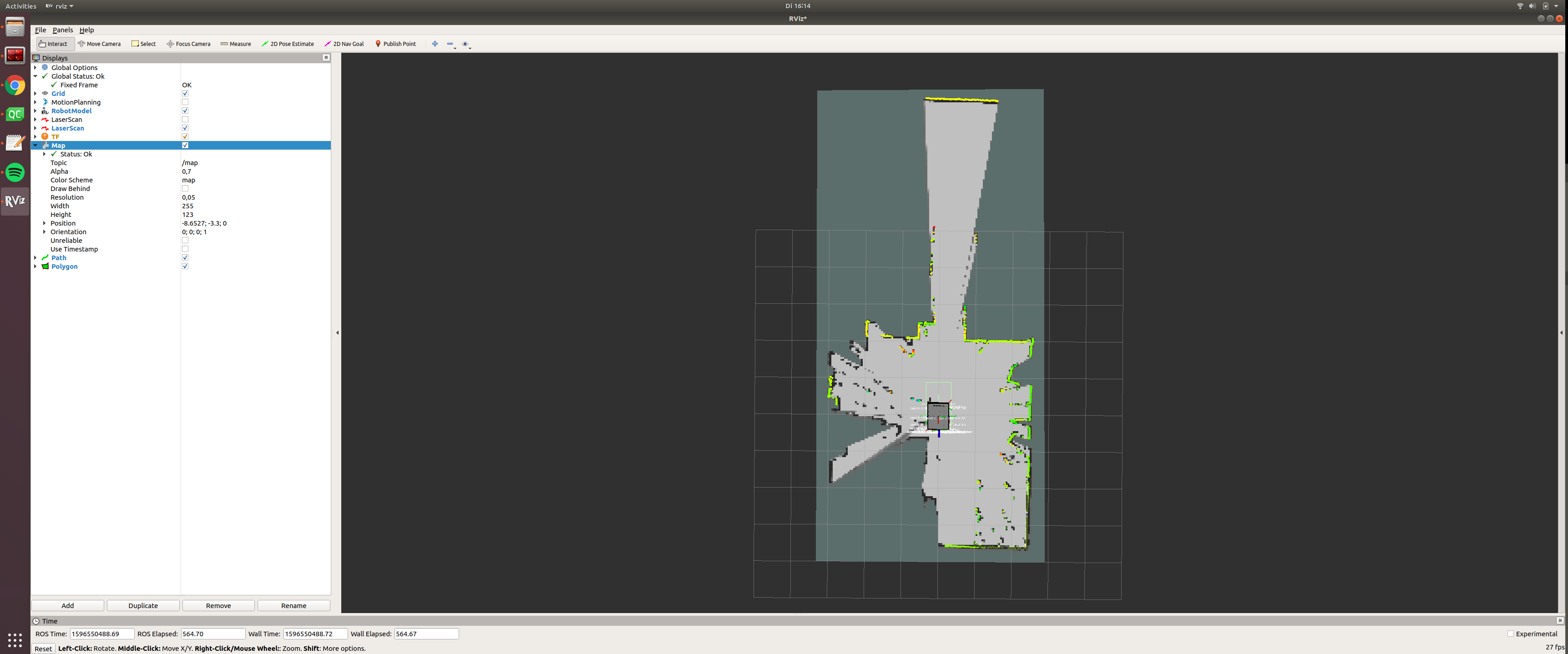
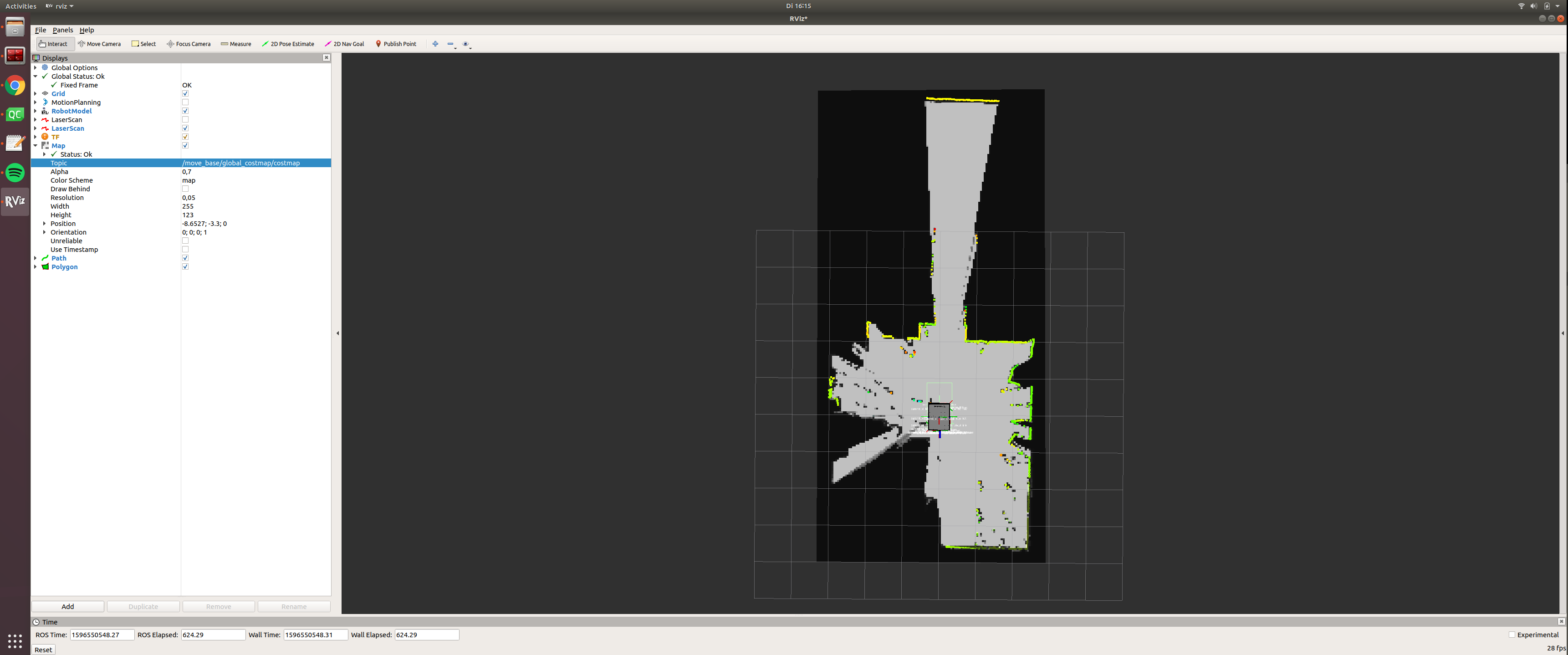
Global costmap also appears fine
And here's the bash output upon launch:
[ INFO] [1596549941.092785775]: Using plugin "static_map"
[ INFO] [1596549941.104525793]: Requesting the map...
[ INFO] [1596549941.807625313]: Resizing costmap to 253 X 121 at 0.050000 m/pix
[ INFO] [1596549941.907431151]: Received a 253 X 121 map at 0.050000 m/pix
[ INFO] [1596549941.912233971]: Using plugin "inflation_layer"
[ INFO] [1596549942.010675365]: Using plugin "obstacle_laser_layer"
[ INFO] [1596549942.012708436]: Subscribed to Topics: front_laser rear_laser
[ INFO] [1596549942.061514494]: Using plugin "inflation_layer"
[ INFO] [1596549942.132655815]: Created local_planner teb_local_planner/TebLocalPlannerROS
[ INFO] [1596549942.274159488]: Footprint model 'line' (line_start: [-0.035,0]m, line_end: [0.035,0]m) loaded for trajectory optimization.
[ INFO] [1596549942.274513507]: Parallel planning in distinctive topologies disabled.
[ INFO] [1596549942.306794861]: Costmap conversion plugin costmap_converter::CostmapToPolygonsDBSMCCH loaded.
[ INFO] [1596549942.733048726]: Recovery behavior will clear layer obstacle_laser_layer
[ INFO] [1596549942.736876785]: Recovery behavior will clear layer obstacle_laser_layer
[ INFO] [1596549942.790454163]: odom received!
[ INFO] [1596549954.794210541]: Resizing static layer to 254 X 121 at 0.050000 m/pix
Now, the moment the last line above appears, the global costmap changes, somewhat dramatically...
- Global costmap not so fine
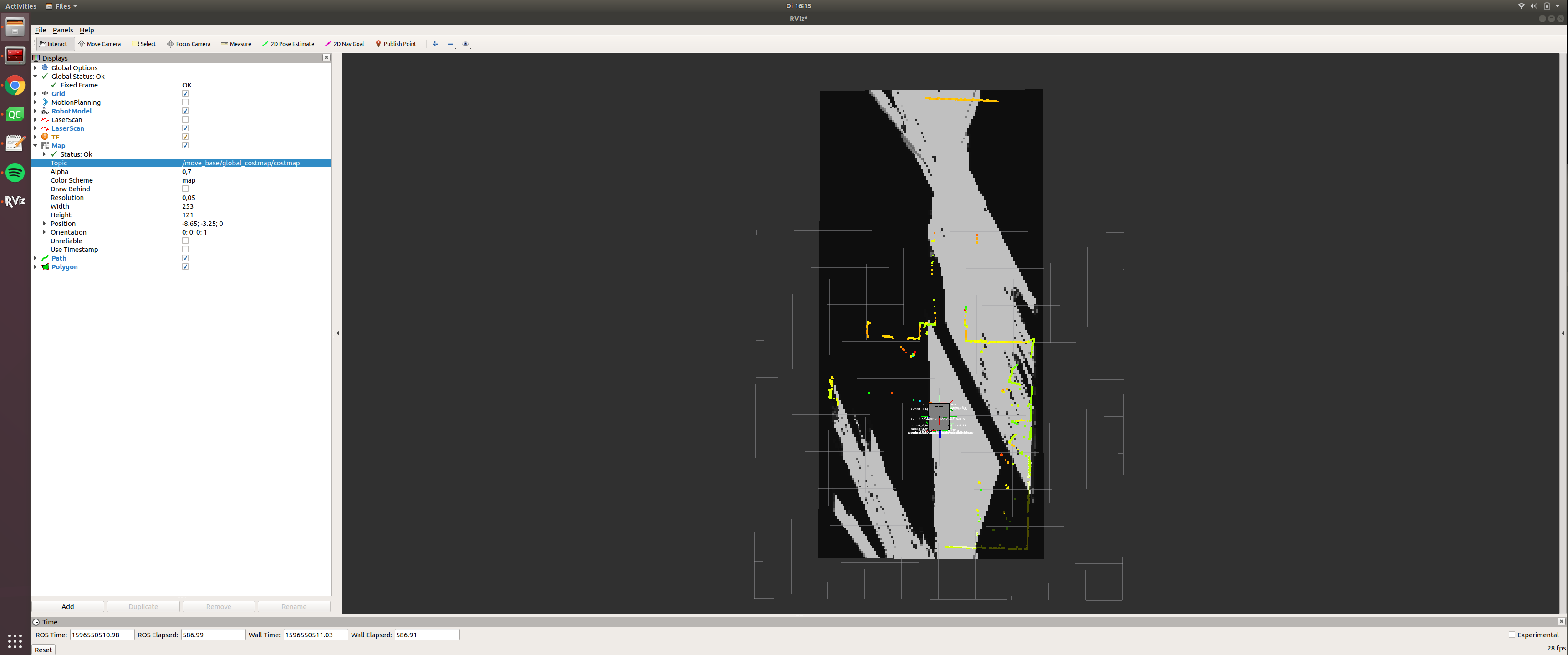
Note that this sudden distortion/resize can also happen after several tens of seconds of movement. However, the occurrence of the distortion is simultaneous with the appearance of the message "Resizing static layer to ...", which makes it look like a cause/effect relationship.
Here are my configs:
#### costmap_common_params.yaml ####
footprint: [[0.875, -0.34], [0.875, 0.34], [-0.375,0.34], [-0.375, -0.34]]
# width: 20 # Tried adding this but to no effect
# height: 20 # Tried adding this but to no effect
publish_frequency: 1.0
inflation_layer:
inflation_radius: 0.05
obstacle_laser_layer:
obstacle_range: 2.5
raytrace_range: 5.5
observation_sources: front_laser rear_laser
front_laser:
data_type: LaserScan
topic: $(arg front_scan_topic)
marking: true
clearing: true
rear_laser:
data_type: LaserScan
topic: $(arg rear_scan_topic)
marking: true
clearing: true
#### global_costmap_params_map.yaml ####
global_costmap:
global_frame: $(arg global_frame)
robot_base_frame: $(arg base_frame)
update_frequency: 5.0
static_map: false
# rolling_window: true
width: 20 # Tried adding this but to no effect
height: 20 # Tried adding this but to no effect
plugins:
- name: static_map
type: "costmap_2d::StaticLayer"
- name: inflation_layer
type: "costmap_2d::InflationLayer"
static_map:
static_map: false
map_topic: map
lethal_cost_threshold: 94
unknown_cost_value: 1
trinary_costmap: false
use_maximum: false
first_map_only: false
track_unknown_space: true
# width: 20 # Tried adding this but to no effect
# height: 20 # Tried adding this but to no effect
#### local_costmap_params.yaml ####
local_costmap:
global_frame: $(arg odom_frame)
robot_base_frame: $(arg base_frame)
update_frequency: 5.0
static_map: false
rolling_window: true
width: 7.0
height: 7.0
resolution: 0.05
footprint_padding: 0.0
plugins:
- name: obstacle_laser_layer
type: "costmap_2d::ObstacleLayer"
- name: inflation_layer
type: "costmap_2d::InflationLayer"
With the rolling_window parameter set to true the distortion does not happen, but we do want the global costmap to include the entire SLAM map at runtime. I tried setting the static_map parameter(s) to false ...
