
DWA planner not respecting "inflation space"

Hello,
Project is running Kinetic, Gazebo 7.16, on Ubuntu 16.04 in a PC.
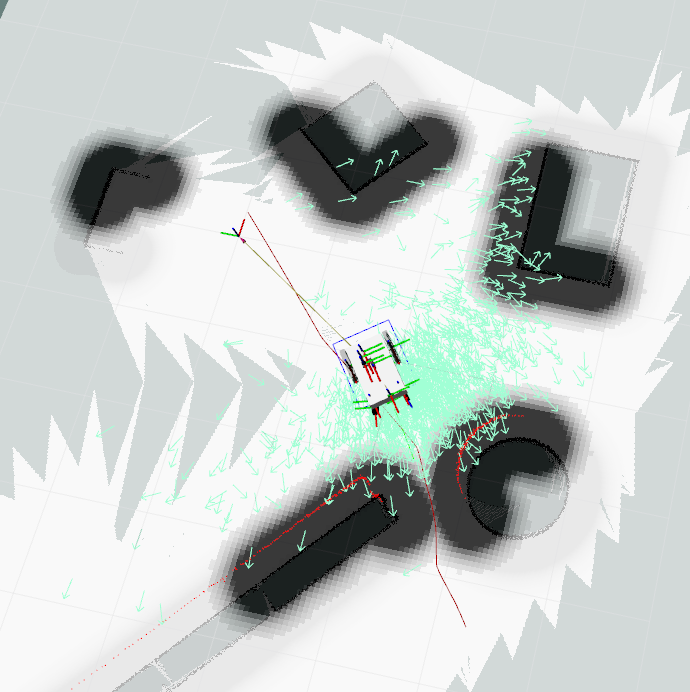
I am trying to utilize the navigation stack on a physical robot. First step is to get it to work in Gazebo. Image below shows the robot in RViz following a global path plan (red line) made by the dwa_local_planner package (https://wiki.ros.org/dwa_local_planne...) through “inflated space” that should be treated as a no-go zone:
The local planner is lauched like so:
<arg name="base_local_planner" default="dwa_local_planner/DWAPlannerROS"/>
…
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
…
<param name="base_local_planner" value="$(arg base_local_planner)"/>
<!--load the parameters for the planners using a yaml file-->
<rosparam file="$(find jimmy_navigation)/config/planner.yaml" command="load"/>
…
</node>
The yaml file for configuring the local planner uses all the defaults as I am not changing any parameters for DWA.
In the common costmap yaml file, I have inflation_radius: 0.5, and it does show in the parameter server:
* /move_base/global_costmap/inflation/inflation_radius: 0.5
* /move_base/local_costmap/inflation/inflation_radius: 0.5
The map given by the map_server is good, the cost maps seem to recognize the walls in the map (as RViz shows a space around the walls), and inflation_radius is set. How do I prevent the planner from squeezing through spaces that are not big enough for the robot? By big enough for the robot I mean the robot should be able to fit between the inflation space on the map. Essentially I want it to respect inflation space. Any, and all advice is welcome!!
I tried to keep the question short, if any info is needed or missing, please let me know and I will gladly add it.
Thank you very much!


I'm not a navigation expert, and I may also be misunderstanding you, but from the image I have the impression the planner is actually doing what it is supposed to do.
The line does not seem to actually "go into" any of the inflated obstacles.
The trick with "inflation" is that it blows up the obstacles, but at the same time reduces the size of the robot. So now checking for collisions is transformed into "does this point ever get contained in any of the inflated obstacles?".
I'm not entirely sure, but perhaps you expected the robot (as in: the regular shape of it) to not "fit" between the inflated areas (ie: the black bands)?
Afaict, that's not how it works.
Thanks @gvdhoorn. I am trying to figure out how to make the thing go through doors without banging up the wall. Now that I think about it, I need to figure out how to define space that is considered no-go space. In the image I need to define a 5cm distance that the robot will stay away from both walls, and the remaining distance needs to be taken into account by the global and local planners. Any advice on where to look for something like this? and thanks so much for all your help. I am very, very grateful for your answers and comments!
Well, as I wrote: I'm not really into navigation.
I just wanted to mention that perhaps what you describe is actually the normal behaviour.
this is what I referred to in my first comment: the "point representation" of your robot is able to fit "between the inflat[ed] space". That's why the planner can plan a path there.
What size is your robot?
@David Lu it's pretty big. about 70cm by 50cm