
What has changed for Navigation package from kinetic to melodic?

I updated from kinetic to melodic recently. I installed turtlebot from source, according to https://github.com/turtlebot/turtlebo..., and I tried to install melodic branch if there is. Then I tested the turtlebot_stage. However, the turtlebot cannot navigate delibrately. I need to increase the cost_scale_factor to around 50, the turtlebot could pass the small space. If use the params by default, the robot will stuck there and keep rotating. However, same parameters are fine in Kinetic.
I checked the navigation package (debian) on Kinetic is 1.14.7 and on Melodic is 1.16.3.
I modified some obsolete parameters according to melodic indication, and now can garantee that there is no big difference. In the end, I found that the cost_scale_factor param in local costmap affect the navigation behavior a lot. (I mean compare kinetic to melodic)
Then I checked the source code and changelog, but cannot find useful infomation about this. Hope to get some insightful explanation here. Thanks a lot!

I encounter similar problem when upgrading from kinetic to melodic, do you figure out why now? Please see my question: What's the difference between melodic and kinetic on navigation stack
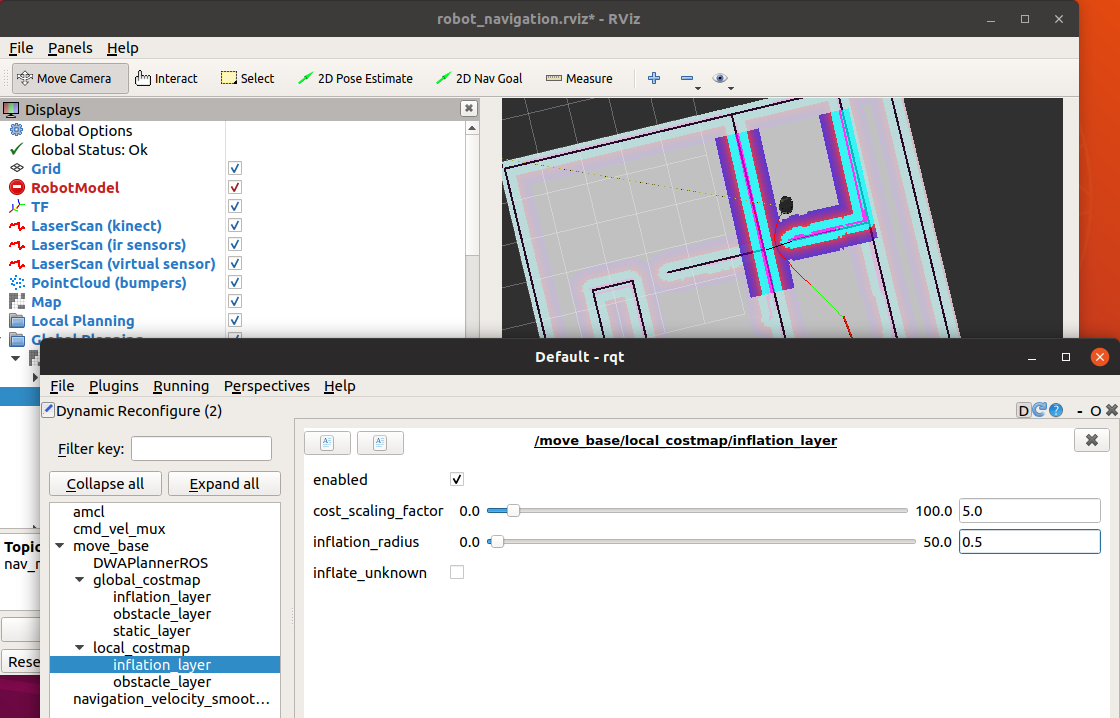
I don't know. but I disabled the inflation layer in local costmap then it can navigation without hesitation..