
Interactive marker not visible in moveit_config
Hey there,
I created a moveit_config package with the setup assistant and defined an endefector as well. However when I launch the following file I do not see the interactive marker to move the endefector in xyz
This is not a duplicate of here
This is my launch file <include file="$(find kuka_30HA_moveit_config)/launch/planning_context.launch"> <arg name="load_robot_description" value="true"/> </include>
<node pkg="tf2_ros" type="static_transform_publisher" name="virtual_joint_broadcaster_1" args="0 0 0 0 0 0 world base_link" />
<!-- We do not have a robot connected, so publish fake joint states -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
<param name="/use_gui" value="false"/>
<rosparam param="/source_list">[/joint_states]</rosparam> <!-- remap to published ones! -->
</node>
<!-- Run the main MoveIt executable without trajectory execution (we do not have controllers configured by default) -->
<include file="$(find kuka_30HA_moveit_config)/launch/move_group.launch">
<arg name="allow_trajectory_execution" value="false"/>
<arg name="fake_execution" value="true"/>
<arg name="info" value="true"/>
<arg name="debug" value="false"/>
<arg name="pipeline" value="ompl" />
</include>
Is it possible to start the interactive marker somehow?
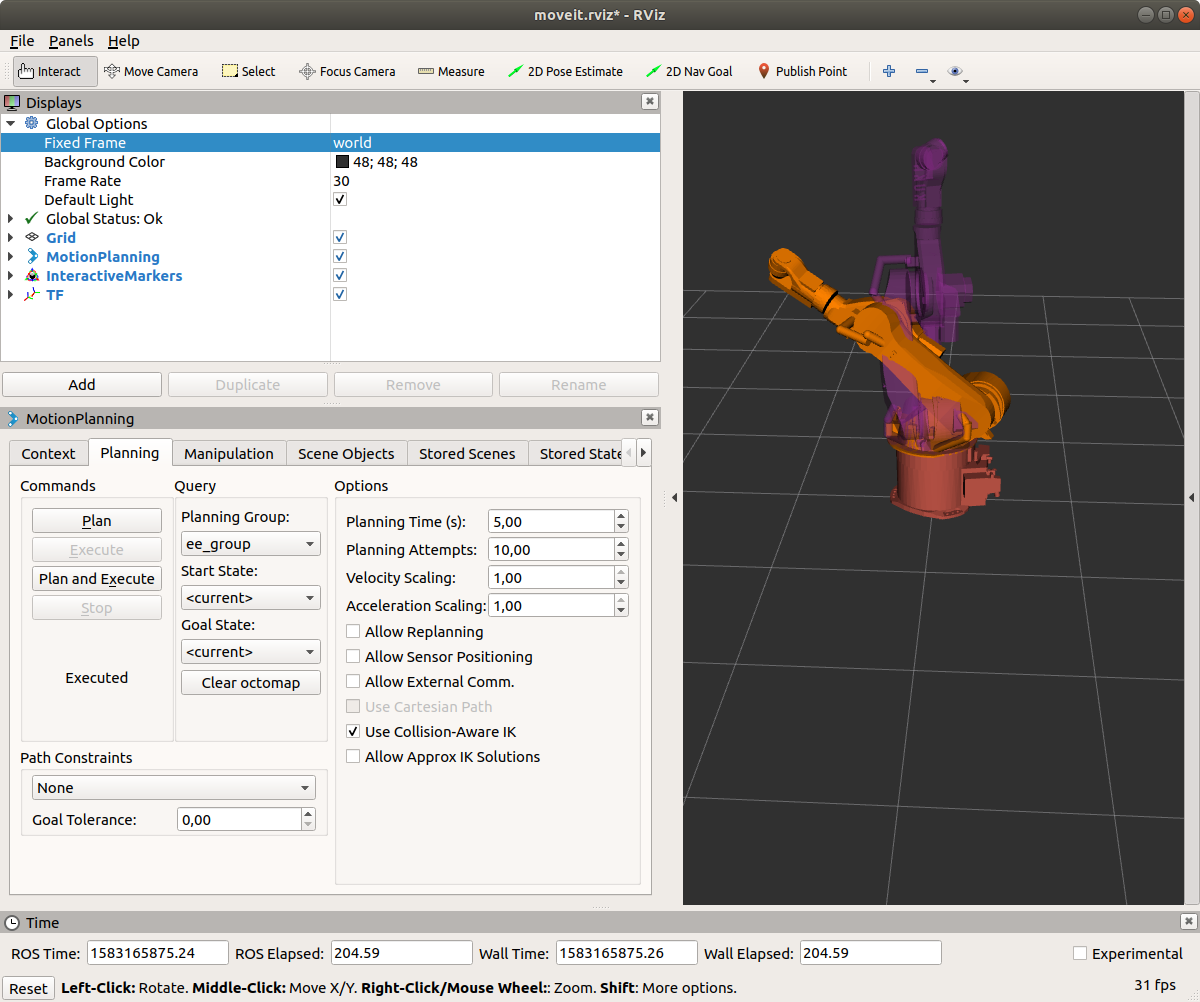

The IM is only shown for groups with a (working) IK solver.
You'll have to make sure you have one configured.
Edit: also:
this doesn't really make sense. The JSP by default will publish on
/join_states, and by configuringsource_listlike this, it will receive its own messages. What are you trying to accomplish?See if my answer here solves your problem