
PointCloud2 doesn't correctly clear obstacles in costmap_2d
Hi,
I have a VLP-16 and am looking to do 3d obstacle detection. I implemented a filter to filter the ground rings and now only have remaining what I am happy is an obstacle estimate. I am trying to put this into costmap_2d but get the following results:
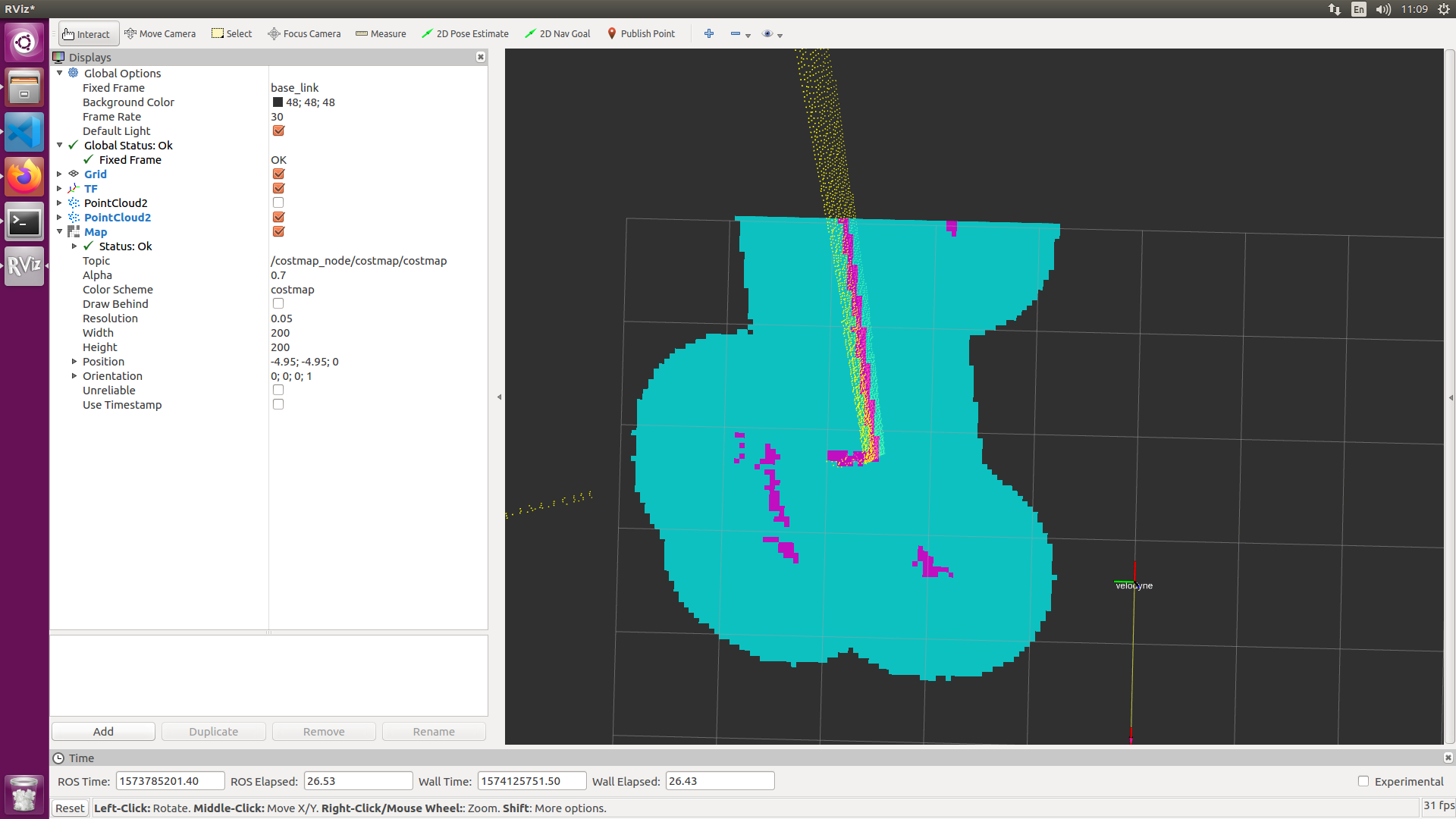
This is after an obstacle has passed through the frame. To verify I took a look at the resulting voxel layer:
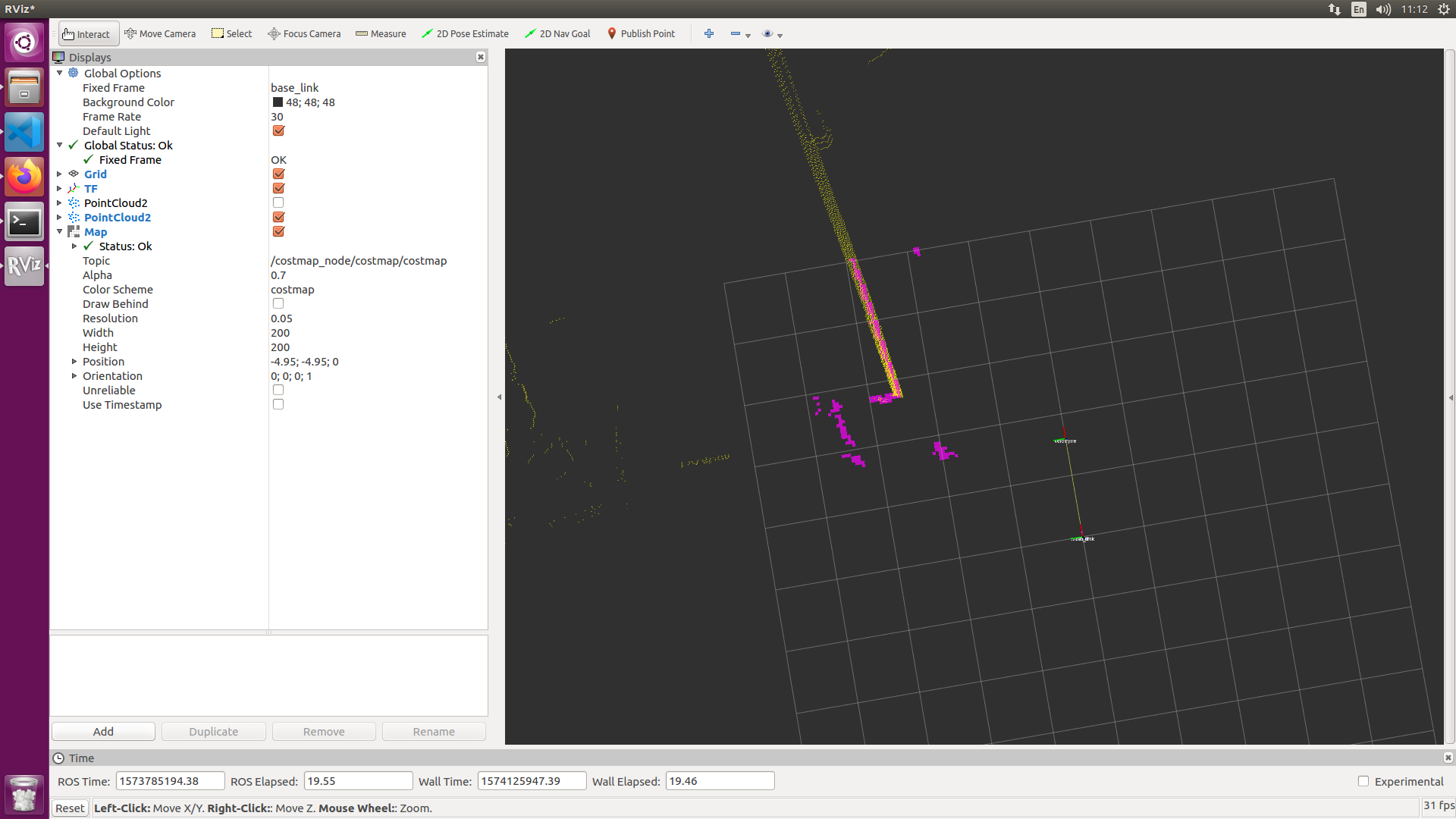
Despite as you can see the input cloud does not show any points in this area. Can anyone help me to understand this and how to fix it?
Thanks :)
params:
#
map_type: costmap origin_z: 0.0 z_resolution: 0.2 # The z resolution of the map in meters/cell. z_voxels: 5
# The number of voxels to in each vertical column, the height of the grid is z resolution * z voxels.
#
obstacle_range: 20 # The default maximum distance from the robot at which an obstacle will be inserted into the cost map in meters. raytrace_range: 20 # The default range in meters at which to raytrace out obstacles from the map using sensor data
# publish_voxel_map: true
footprint: [[1.115, 0.92], [-1.115,
0.92], [-1.115, -0.92], [1.115, -0.92]] footprint_padding: 0.2 inflation_radius: 1.0 # controls how far away the zero cost point is from the obstacle cost_scaling_factor: 0.5
# slope of the cost decay curve with respect to distance from the object. lower makes robot stay further from obstacles footprint_clearing_enabled: true
global_frame: odom robot_base_frame: base_link update_frequency: 10.0 publish_frequency: 5.0 static_map: false rolling_window: true width: 20.0 height: 20.0 resolution: 0.05
observation_sources: laser_scan_sensor
laser_scan_sensor: {sensor_frame: base_link, data_type: PointCloud2, topic: /out_cloud, marking: true, clearing: true, min_obstacle_height:
-0.3}
add a comment
