
Why is RosAria PointCloud and LaserScan mirrored?
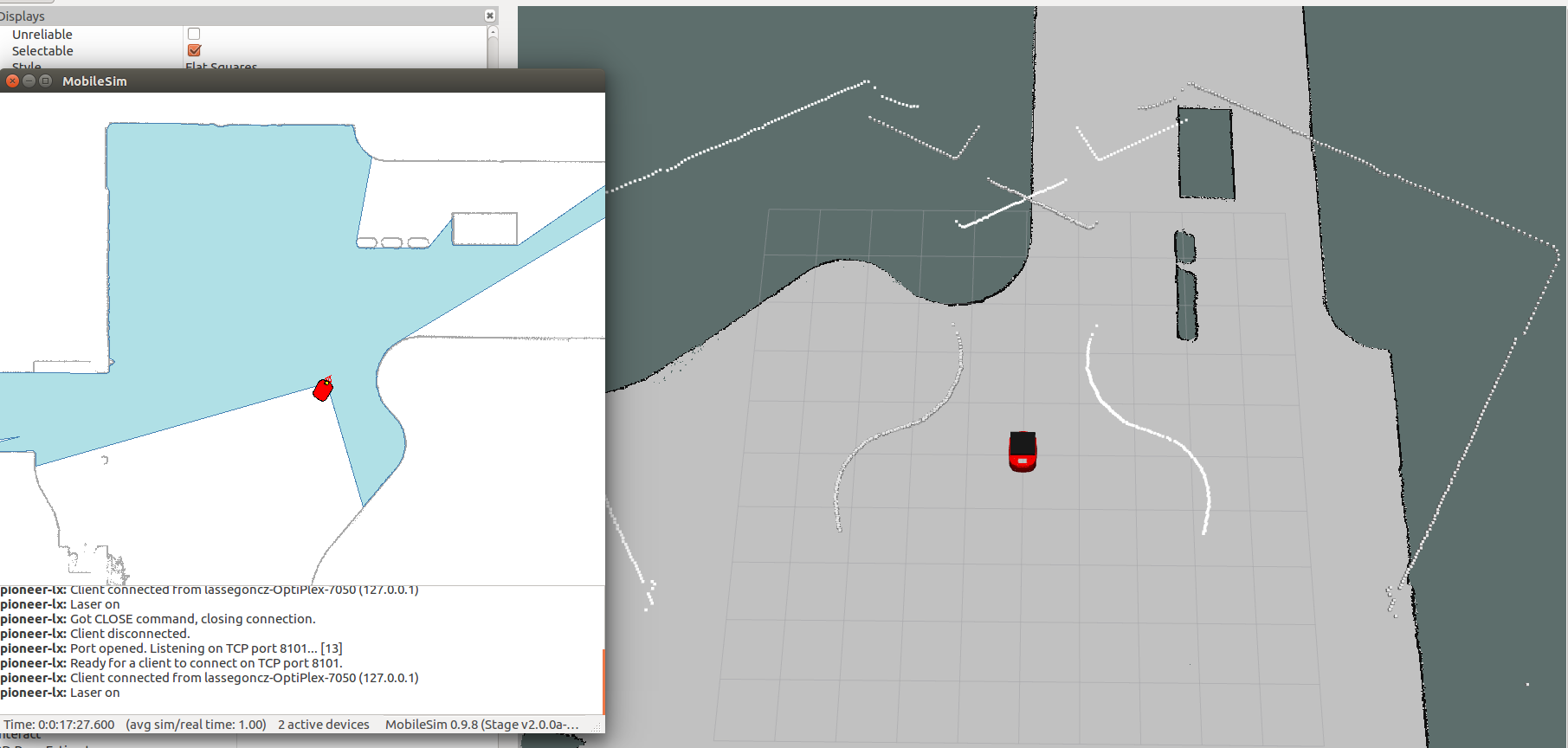
Is there a reason why the pointcloud and laserscan readings from rosaria (when running MobileSim) is mirror in relation to eachother when observing in RVIZ? It seems like the pointcloud (flat squares) is correctly oriented in relation to the simulation in MobileSim while the laserscan (boxes) are mirrored. Why is this?

Please attach your image directly to the question, so we can keep things self-contained.
I've given you sufficient karma to do that.
Thank you, corrected now.
Are you sure your transforms are properly set?
It is like you are publishing the Pointcould in a frame and the laser scan in another frame with a different transformation.
I believe the OP is using one of the
.xacros from the MobileRobots/amr-ros-config repository (#q335375), so I would assume those are OK, but perhaps there is some configuration that needs to be updated.I Indeed use the urdf from MobileRobots/amr-ros-config. Specifically this one which I believe should be correct, right?
I don't see any mention of a laser scanner or anything about sensors in that
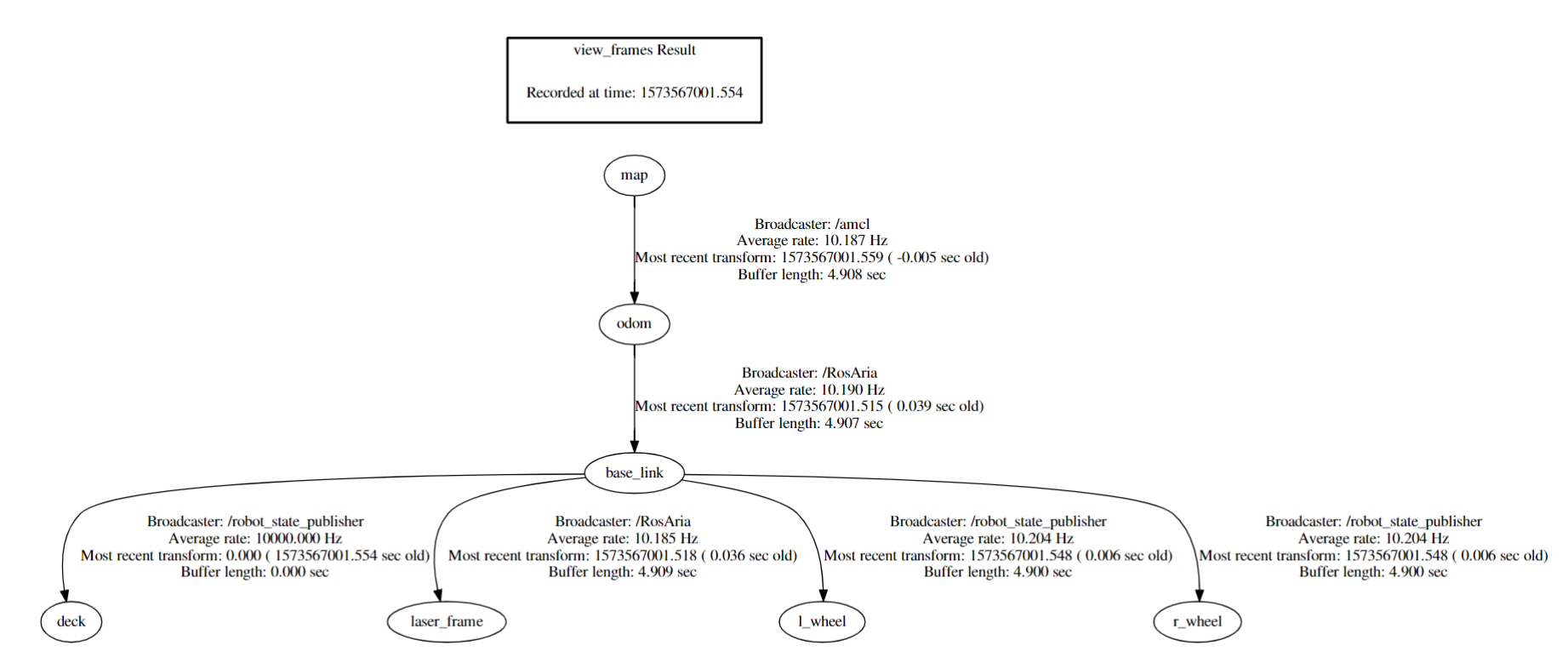
.urdf. Did you add something yourself? Or how did you 'attach' the laserscanner to the robot model?The transformation between the base_link and laser_frame is published by RosAria (see the image I added to the original post).
that could be, but that does't mean it necessarily correct.
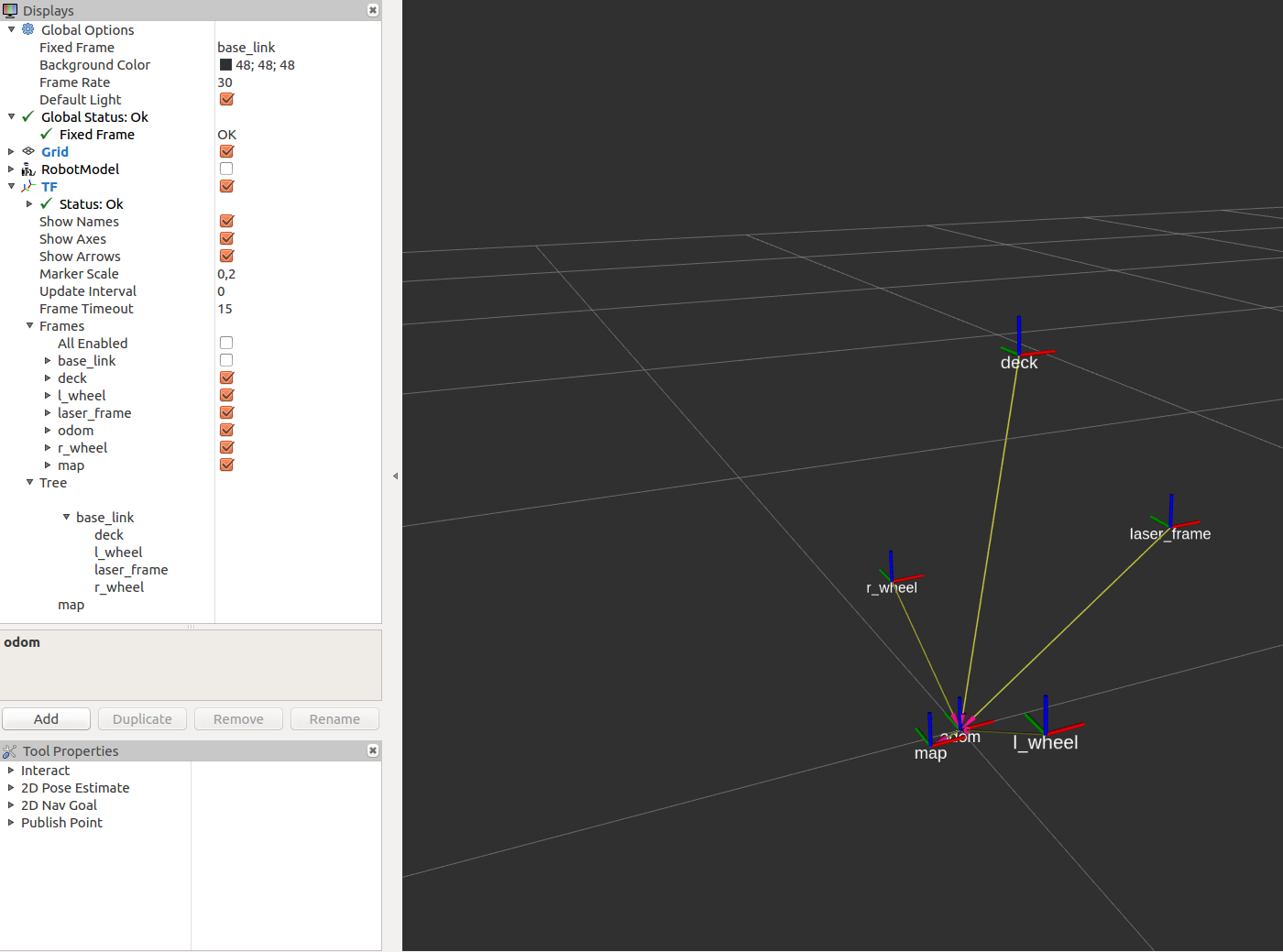
If you visualise the TF tree in RViz (add the display), does it have the expected orientation?
From your RViz+rosaria screenshot it looks to me like the entire robot is 'backwards'. Does rosaria require any configuration? Perhaps you need to tell it which model Pioneer you have and what sensors are mounted and how?
I've never used rosaria or these robots though, so I could be wrong.