no timestamps when publishing for fixed joints robot_state_publisher
Hi guys,
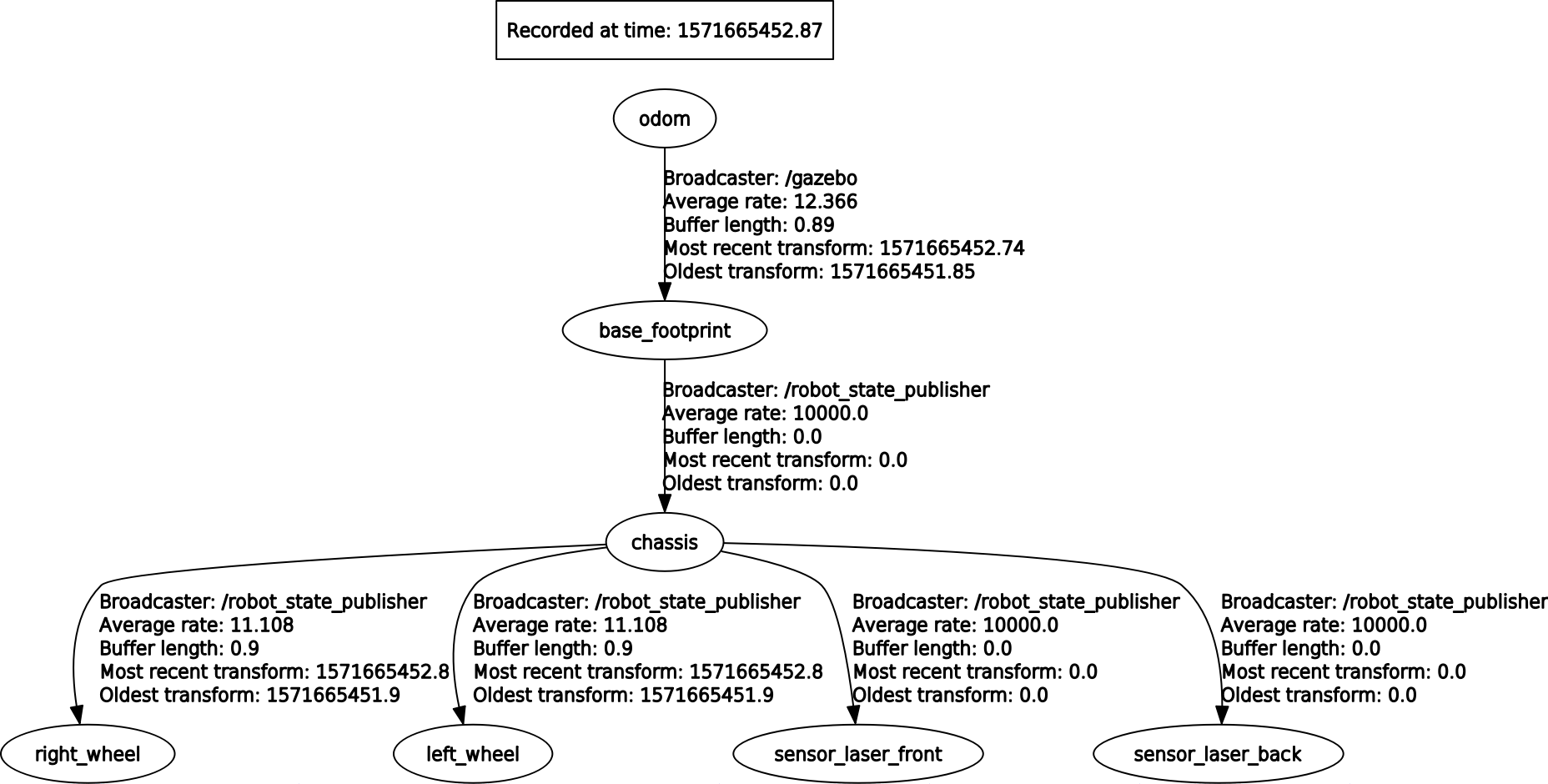
I have the following problem: I wrote a launch file which launches my differential drive robot with 2 lidar sensors in gazebo and rviz. The odometry for my robot comes from the differential drive plugin and the transforms for my robot come from the nodes "robot_sate_publisher" and "joint_state_publisher". I have 3 fixed joints "base_link" to "chassis" and "chassis" to each of the lidars and 2 continuous joints "chassis" to "wheel" for each wheel. Now when I look at the rqt_tree I see that the transforms for all the fixed joints, there is no time_stamp for the transforms and also I cannot choose to see the Pointcloud data in the odom frame since rviz tells me that the message was removed, because it is too old.
My question: do I have to code now a separate node which broadcasts all these transforms with a time stamp? I thought that the robot_state_publisher and joint_state_publisher nodes that I launch in the launch-file are exactly for that: to publish all the transforms (whole transform tree) of my robot. But I only get stamped messages for the chassis to wheel tranforms and odom to base_footprint transforms but not for the fixed joints. (I already tried with static_transform nodes to publish static transforms, but still no timestamp)
Launch File:
<launch>
<!--Robot Description from URDF-->
<param name="robot_description" command="$(find xacro)/xacro $(find sim_1)/urdf/robot.xacro"/>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher"/>
<!--node pkg="tf" type="static_transform_publisher" name="to_chassis" args="0 0 0.35 0 0 0 /base_footprint /chassis 50"/>
<node pkg="tf" type="static_transform_publisher" name="to_laser_back" args="-0.45 -1 1.25 0 0 0 /chassis /sensor_laser_back 50"/>
<node pkg="tf" type="static_transform_publisher" name="to_laser_front" args="0.45 1 1.25 0 0 0 /chassis /sensor_laser_front 50"/-->
<!--RViz-->
<node name="rviz" pkg="rviz" type="rviz" required="true"/>
<!--Gazebo empty world launch file-->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="false" />
<arg name="gui" value="true" />
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="false"/>
<arg name="headless" value="false"/>
<arg name="verbose" value="true"/>
</include>
<!--Gazebo Simulator-->
<node name="spawn_model" pkg="gazebo_ros" type="spawn_model" args="-urdf -param robot_description -model robot" output="screen"/>
</launch>
Thank you very much in advance!