
Problem configuring Navigation stack
I am using navigation stack along with move_base and for localization, i am relying on robot_localization instead of amcl. Also i am not using gmapping. Here is what i am doing. first roscore on my PC, then roslaunch bringup..... on my robot, then launching ekf_template.launch file whose .yaml file is below. i am using two sources of odomtery.
map_frame: map
odom_frame: odom
base_link_frame: base_link
world_frame: odom
Then launch a map through launch file without specifying any frame.Then launch navigation stack and then move_base. Now i want to configure the global and local cost map values and also how the tf will work. My environment is static and and require no dynamic obstacles. But if use default values of move_base, i am getting error. I am not very profound in ROS, so a little help/guide will be highly appreciated.I try to learn from wiki.ros about how the parameters will act but still i am unable to use.
Update::
Errors and .yaml files
My local cost map .yaml file is
local_costmap:
global_frame: /map
robot_base_frame: base_link
update_frequency: 10.0
publish_frequency: 10.0
transform_tolerance: 0.5
static_map: true
rolling_window: true
width: 5
height: 5
resolution: 0.0
and my global costmap .yaml file is
global_costmap:
global_frame: odom
robot_base_frame: base_link
update_frequency: 10.0
publish_frequency: 10.0
transform_tolerance: 0.5
static_map: true
Update:
So i guess i was missing state publisher in robot_localization. I added this code in my ekf_template file, and now i am not getting the above warning, instead i get this.
[ WARN] [1570390223.076345613]: Costmap2DROS transform timeout. Current time: 1570390223.0762, global_pose stamp: 1570211809.1178, tolerance: 0.5000
This is what i added.
initial_state: [1.5, 2.0, 0.0,
0.0, 0.0, 1.0,
0.0, 0.0, 0.0,
0.0, 0.0, 0.0,
0.0, 0.0, 0.0]
i have provided my tf tree in updated question. I want to move my robot using move_base while locating it by the information provided by robot_localization. What should i do?
Rosnode list:
/ekf_se
/map_server
/publisher_turtlebot_1028_1570209552521
/robot_state_publisher
/rosout
/rviz
/turtlebot3_core
/turtlebot3_diagnostics
Tf tree: 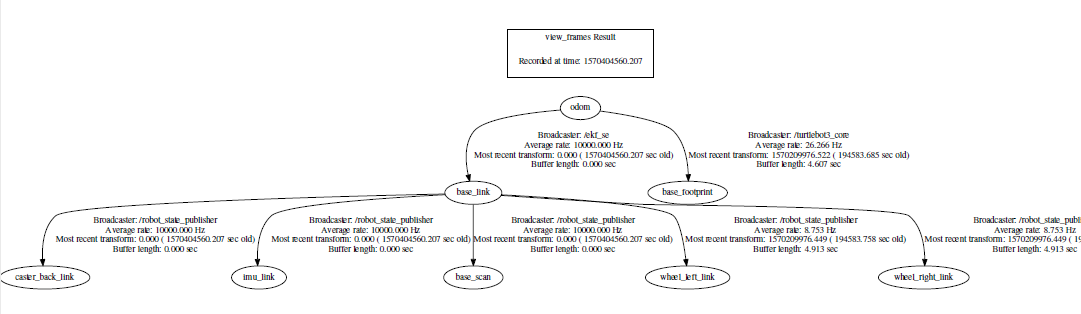
Any suggestions how should i make the frame selection

Can you please update your question wit a copy and paste of the error?
i have updated my question. Can you please have a look and hopefully help me with some solution
Hi.
will come up until the robot initial pose has been set. It's not serious unless you have set the initial pose and are still seeing it. Note that it is not a error. It is a warning.
You can search for many other questions here for the time stamp question.
If you haven't yet gone through the entire tutorial for the Navigation Stack, I strongly suggest you take the time to do so.
When I start up nav stack I get serveral warnings as different nodes get started and things get set up. If you have a specific question about something not working, it will be easier to help.
I suggest you add your TF tree to the question to allow us to have better idea of what you're working on.
So i guess i was missing state publisher in robot_localization. I added this code in my ekf_template file, and now i am not getting the above warning, instead i get this.
This is what i added.
i have provided my tf tree in updated question. I want to move my robot using move_base while locating it by the information provided by robot_localization. What should i do? I am unable to provide my tf tree as it requires 5 points and i am new on here. But from odom, it goes to base_footprint (broadcaster: turtlebot3_core) and base_link(broad caster: ekf_se), and base_footprint ends ...(more)
@Ahmed1212 I upvoted your question so that you have enough points to upload a picture of your tf tree.
Thanks. I Have updated my question
I dont see the map frame being generated at all. Also 0.0 resolution for the local costmap does not make any sense. To begin with, I would suggest using
odomasglobal_framefor both local and global costmaps and set some reasonable resolution (0.1-0.5) for them both. Also can you post your costmap common parameters where the plugins/layers are declaredI have changed my resolution to 0.5 and also odom as global frame in both,but still of no good. Below is my costmap common parameters. I am not declaring any plugins. How and what should i do?