How does rtabmap handle free space in an octomap?
Hello,
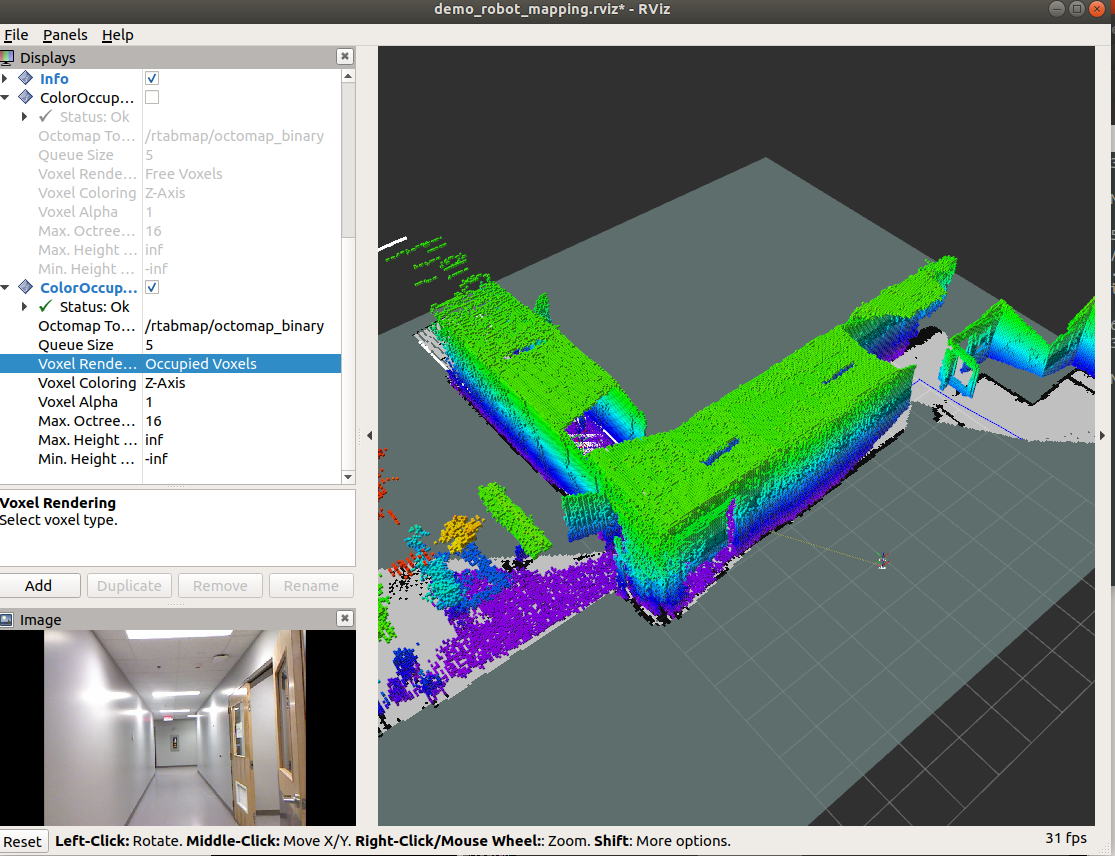
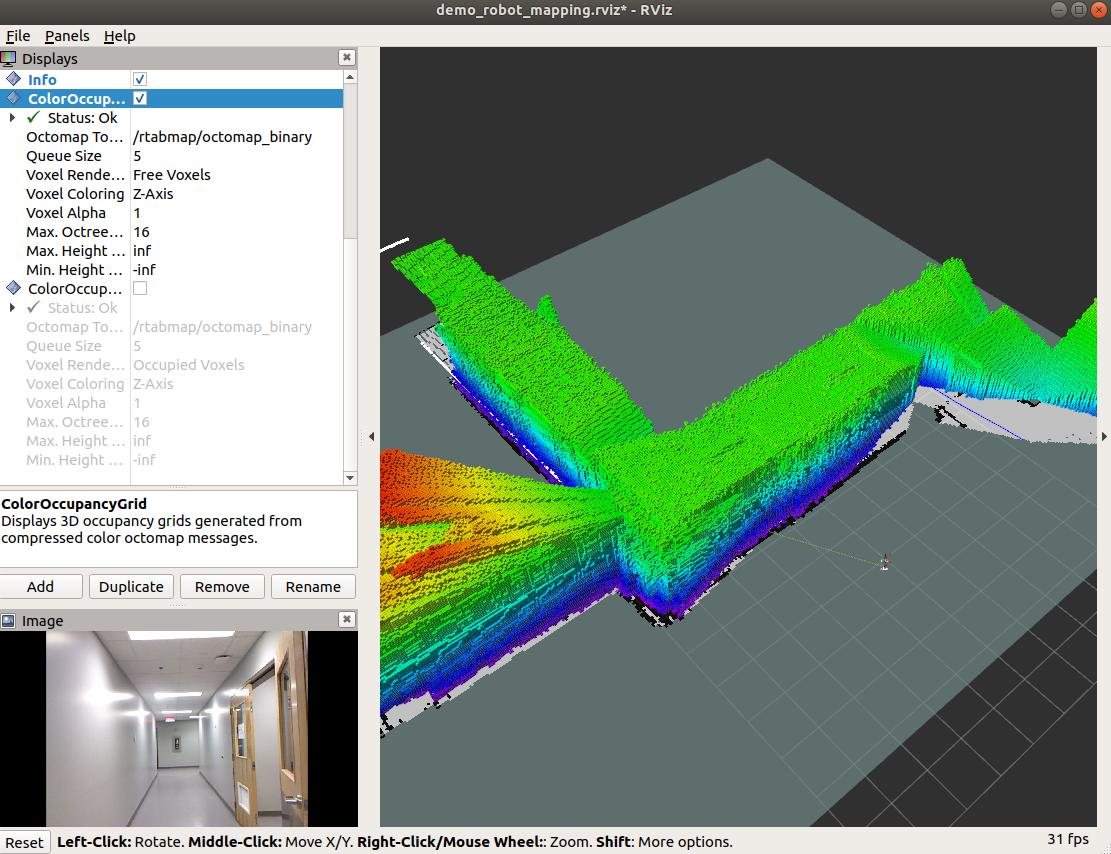
I am using the octomaps generated from rtabmap. Ideally in our application we would like all of the unknown space to be marked as free. It seems like the octomaps generated by rtabmap only include the obstacles and ground. Is it possible to mark unknown space to be free? I see the parameter "grid_unknown_space" but that sounds like it is only for the grid_maps. It also sounds like there is some ability for ray tracing but is that only possible when using a laser scanner or 2D map? Ideally, we need a octomap_msgs/Octomap that's 3D (or 2D) with free space marked as unknown generated by a depth camera (such as the realsense D435i).
Thank you!
add a comment