
MoveIt Quickstart in RViz
Hello ROS users ^^ I am using MoveIt Tutorial. (https://ros-planning.github.io/moveit...) When I am launching my RViz with (roslaunch panda_moveit_config demo.launch rviz_tutorial:=true), I see an empty world. Until now, everything works well here. But my problem is here!!! When I add MotionPlaning to my Display window, my panda robot arm is stick together and doesn't look like a normal arm! (I have attached screenshots about my arm and a normal arm!). I also used MoveIt Setup Assistant and created my own configurations, (https://ros-planning.github.io/moveit...), but still doesn't work!
Can you help me????!
I am using Ubuntu 18.04 LTS and ROS Melodic.
Here is a screenshot of robot. Please look at it here ---_(https://drive.google.com/file/d/1yjzGr-_QAcJ5wz8ka-g9e_nF_FmKXiuT/view?usp=sharing)
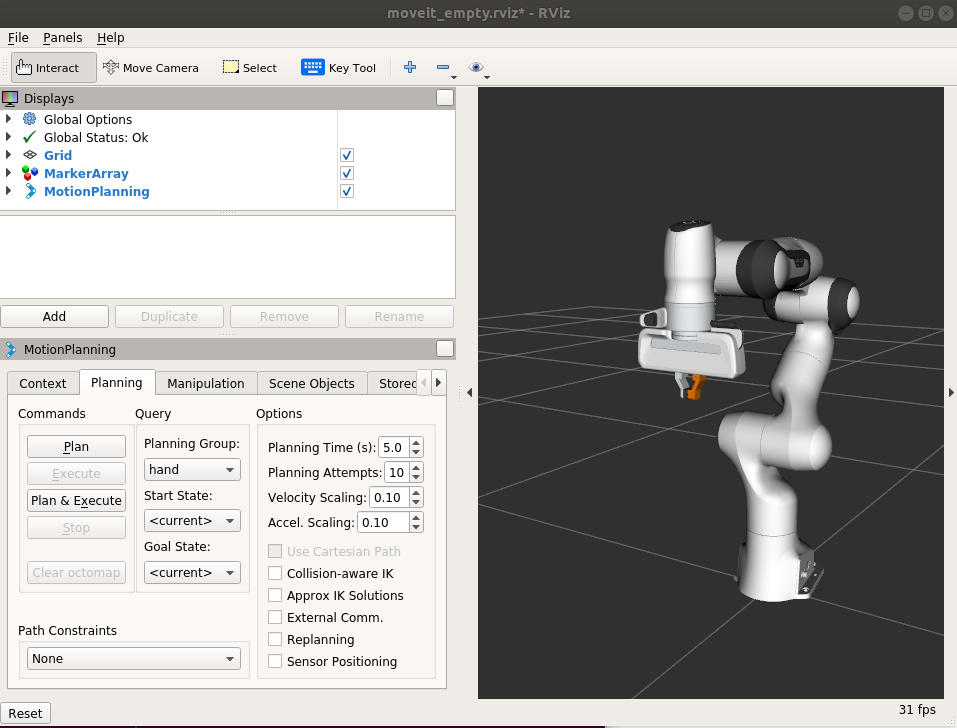
My robot arm should look like this, but it is not!

Please attach your screenshot to the post directly. I've given you sufficient karma for that.
Have you seen q296438? I remember seeing other related "collapsed links" questions but can't find them.