TF to acqiure pose of a camera

I've two cameras that I am calibrating using their own patterns. I've successfully calibrated my stereo_camera, all good until here.
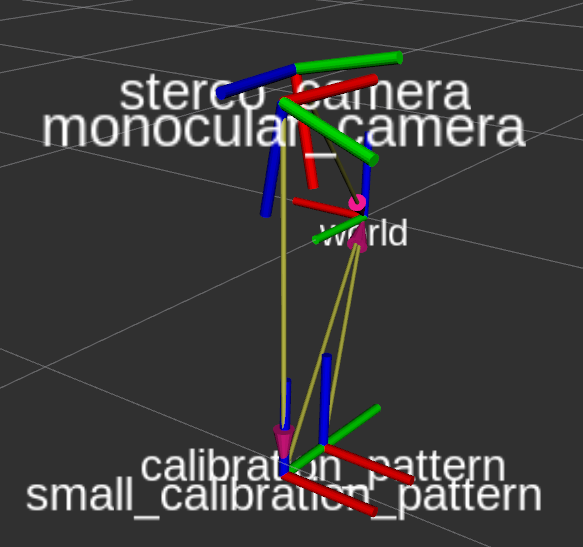
I'm now trying to calibrate my monocular camera and I entered the rotation matrix outputted by its calibration process. It does all the calculations taking the small_calibration_pattern into account. However, after visualizing the monocular camera frame on RVIZ, I've noticed that its tilt is in the wrong direction (it must have the same tilt as the stereo, since they're fixed physically together with a holder), in other words, it requires an additional multiplication or a frame transform so that the tilt becomes correct.
I thought of simply entering the orientation of the stereo one (since I know there is no error in that one) but before I do that, I wanted to know if there is a possibility of doing this mathematically.
PS: Monocular camera has its Z/blue facing towards the pattern, whereas stereo uses red/X. This is not a huge problem and it can stay like this, just saying so that it doesn't confuse anyone.