
Client [/rviz_15....] wants topic /odom to have datatype/md5sum [sensor_msgs/PointCloud/d8....], but our version has [nav_msgs/Odometry/cd... Dropping connection.
I’m getting this error: The robot launch file starts and all appears good. I start rviz then I get one Pose array dataset then this error
[ERROR] [1556066738.031123079]: Client [/rviz_1556066697211260013] wants topic /odom to have datatype/md5sum [sensor_msgs/PointCloud/d8e9c3f5afbdd8a130fd1d2763945fca], but our version has [nav_msgs/Odometry/cd5e73d190d741a2f92e81eda573aca7]. Dropping connection.
This message seems to indicate the required data type should be [sensor_msgs/PointCloud] However, all the ROS info seems to indicate the proper /odom data type is [nav_msgs/Odometry] At this time I suspect a AMCL or a RVIZ setup issue
Here is the AMCL launch file
<launch>
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha5" value="0.1"/>
<param name="transform_tolerance" value="0.5"/>
<param name="initial_pose_x" value="-3.8"/>
<param name="initial_pose_y" value="6.0"/>
<param name="initial_pose_a" value="0.5"/>
<param name="gui_publish_rate" value="1.0"/>
<param name="laser_max_beams" value="30"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="5000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.8"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.2"/>
<param name="update_min_a" value="0.5"/>
<param name="odom_frame_id" value="odom"/>
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="0.5"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
</node>
</launch>
4/25/2019 - Thank you gvdhoorn for boosting my karma - I will keep my images limited to GUI's - Charlie
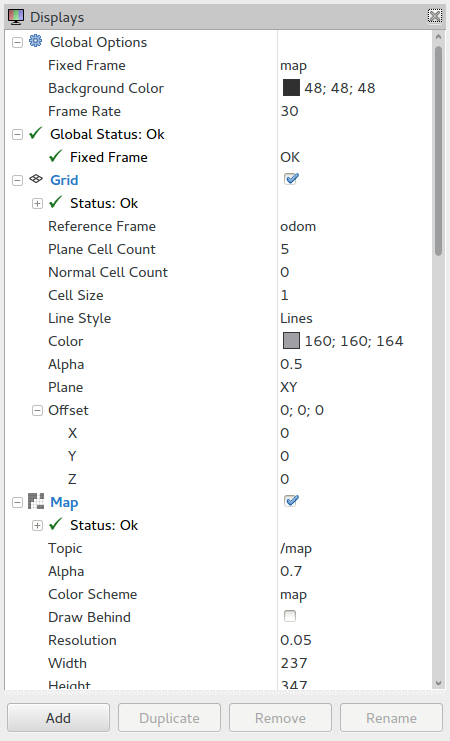
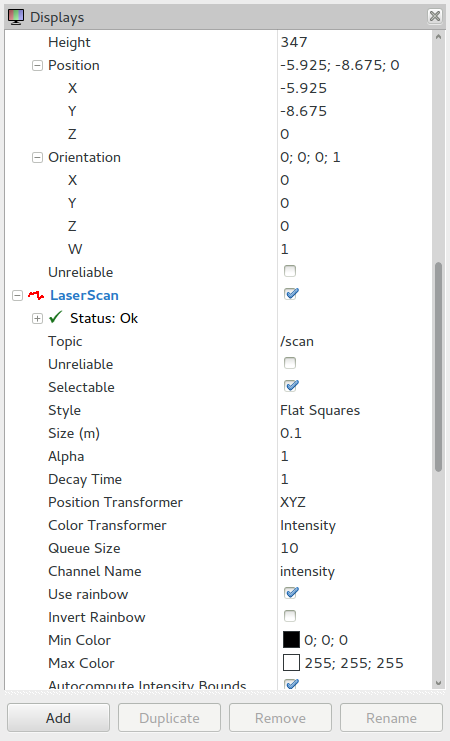
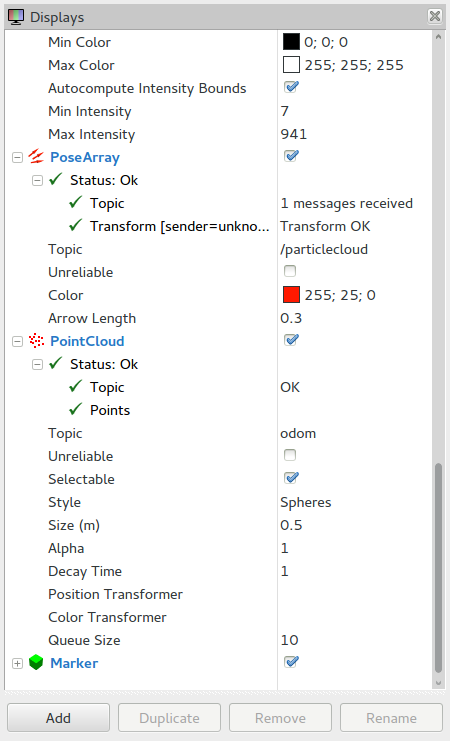

You are correct, this is almost certainly an issue with your rviz config. Can you post your rviz config file or a screenshot of rviz?
I second @ahendrix. As you haven't posted the config yet: I don't think this has anything to do with the
particlecloud. Check your configured display types, identify the one that is used to display a pointcloud and check if the topic configured there is calledodom. If yes, remove and you should be good to go.More hints to debug:
rostopic info /odomshould show you who is trying to publish/subscribe,rosnode info <NODE>should give you more info about the types the respective nodes expect.@CharlieD: I've given you sufficient karma to post a screenshot.
Know that this (ie: as a GUI is involved) is just about the only situation in which posting a screenshot makes sense.