
move_base local costmap stops working after a while
Hello,
I recently started using the move_base package for our navigation stack. Everything seems to be working well, and I'm still consistently tuning the parameters. However, I noticed that, after a few paths are completed, the local costmap stops updating. I have to shutdown the node and restart to get it to function again. It will be properly working to avoid dynamic obstacles, then all of the sudden it will stop reporting them on the costmap, causing it to run into them. Is there anyone else that has experienced this issue?
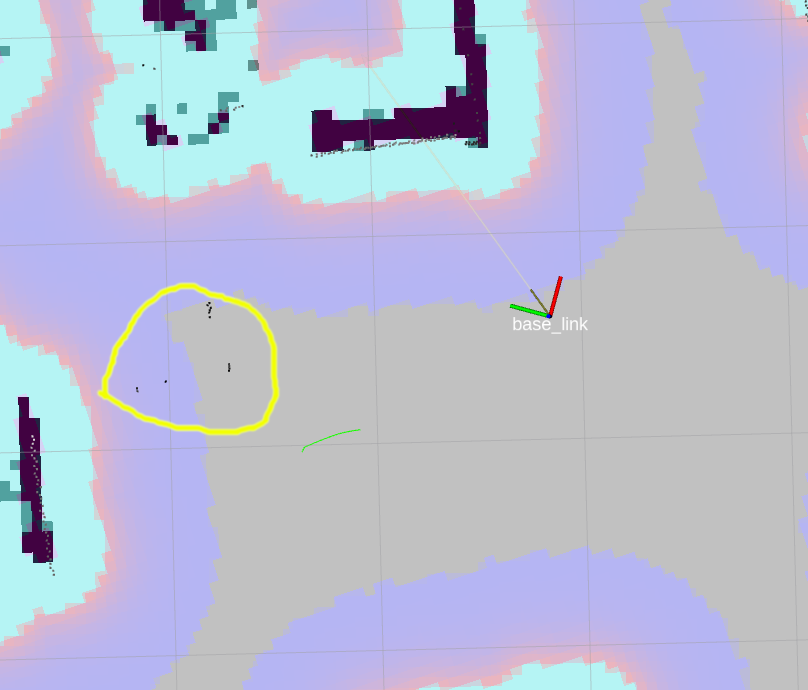
I can post my parameters if need-be, but I can tell this is happening regardless of the configuration. Here's an image of what I'm seeing (the scan points are circled in yellow, they should have been sensed as an obstacle and should be inflated just like the surrounding static map):
I'm using the ROS Kinetic version of the move_base package (from the official repo). Thanks for any advice.

Posting parameters and a video of it working then getting stale is a good start. Also making sure that you're not having your CPU totally saturated.
@stevemacenski, Hello Steve. I have the same problem. Could you look at my question? https://answers.ros.org/question/3633...
Thanks
@nprof50 Hello, I have got the same problem. Did you achieve to solve it?