
TF transform not being published
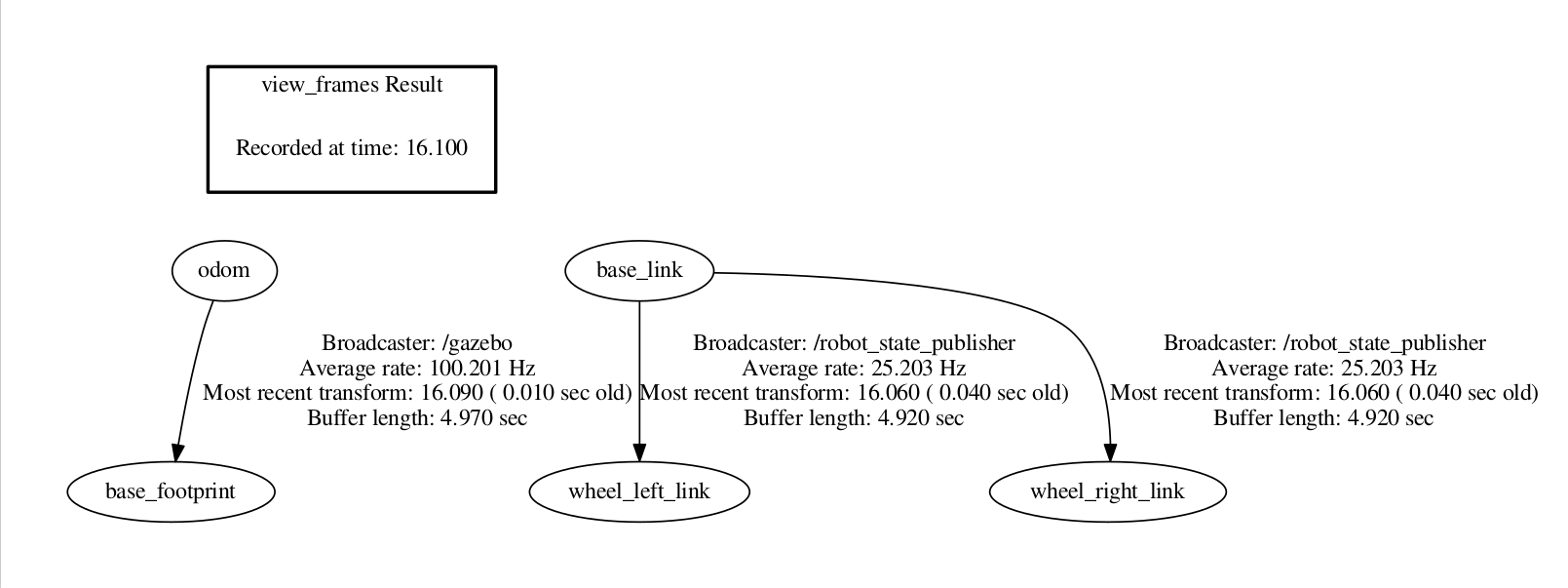
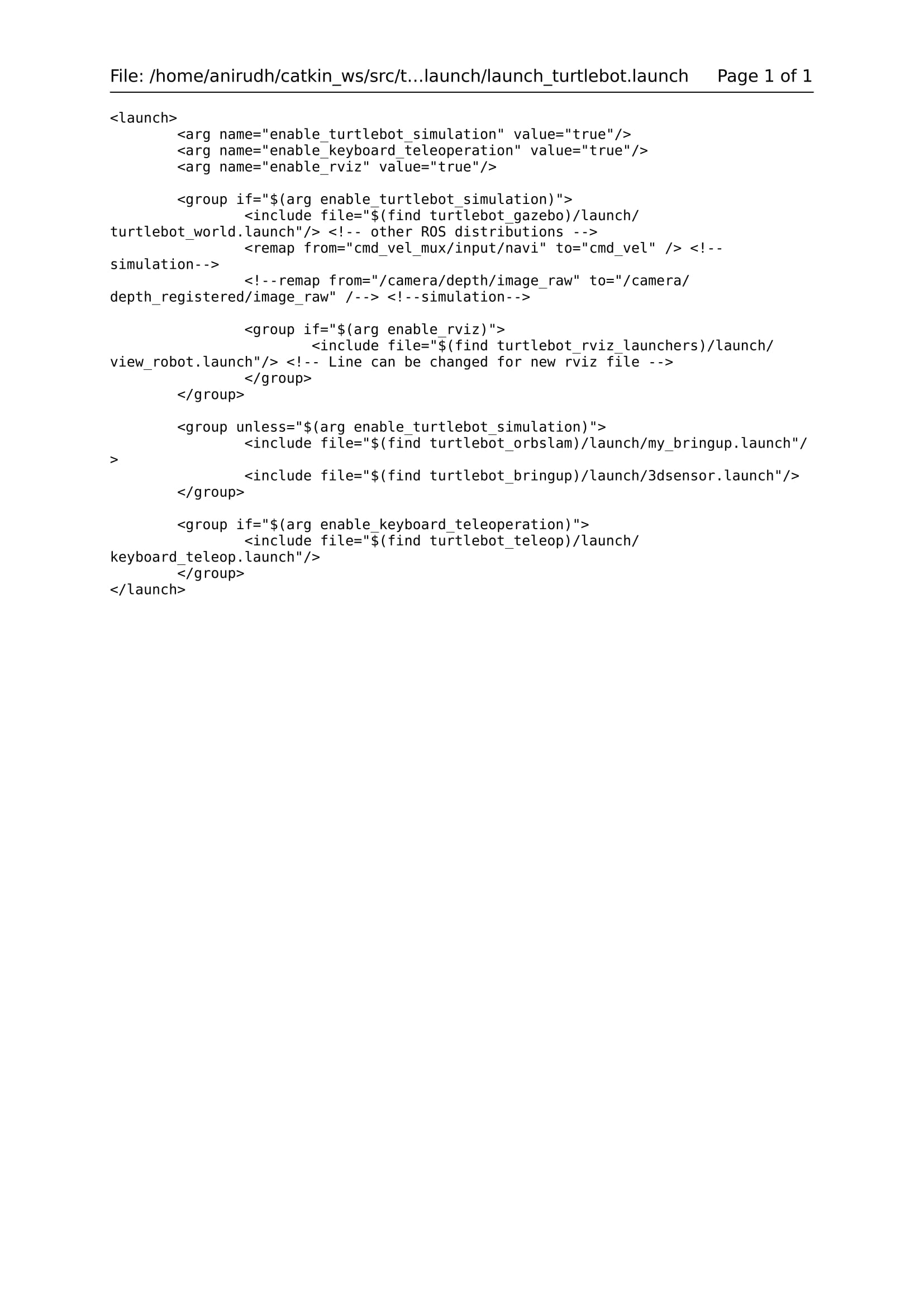
I am currently having issues in launching the minimal.launch file from the turtlebot_bringup package. When the mentioned launch file is launched in Gazebo simulation under ROS Indigo and Kinetic, the tf tree obtained is different for both the versions of ROS. The C:\fakepath\frames_indigo.png file is the tf tree being published under ROS indigo while C:\fakepath\frames.png is published while using ROS kinetic. And the file C:\fakepath\launch_turtlebot.launch-1.jpg file is the launch file being used on both the systems. The tf frames are viewed after launching just this particular launch file.
The C:\fakepath\minimal.launch-1.jpg , C:\fakepath\minimal.launch-2.jpg and C:\fakepath\minimal.launch-3.jpg images together comprise of the minimal.launch file from the package turtlebot_bringup in ROS Indigo. This file has some additional lines related to RAPP manager that are not present in the same launch file in ROS Kinetic. I am not sure if that causes the problem with the TF frames.
ROS is correctly configured and is working on ubuntu 12.04 for ROS indigo and on ubuntu 16.04 for ROS kinetic. Any help would be greatly appreciated.
EDIT : Thanks to @gvdhoorn The files have now been attached with the question.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Could I ask you to please attach the (screenshot of the) tf tree directly to your question? I've given you enough karma to do so.