
UWSim /g500/pose doesn't echo anything
Hello,
I want to compare my algorithm's tx ty tz qx qy qz qw to the groundtruth in UWSim.
I created my robot and the environment, however, when I run
$ rostopic echo /g500/pose
I get absolutely nothing. What am I missing?
I created a simple teleoperation where I can control my robot using arrow keys and W A S D. So I was expecting the pose to show up.
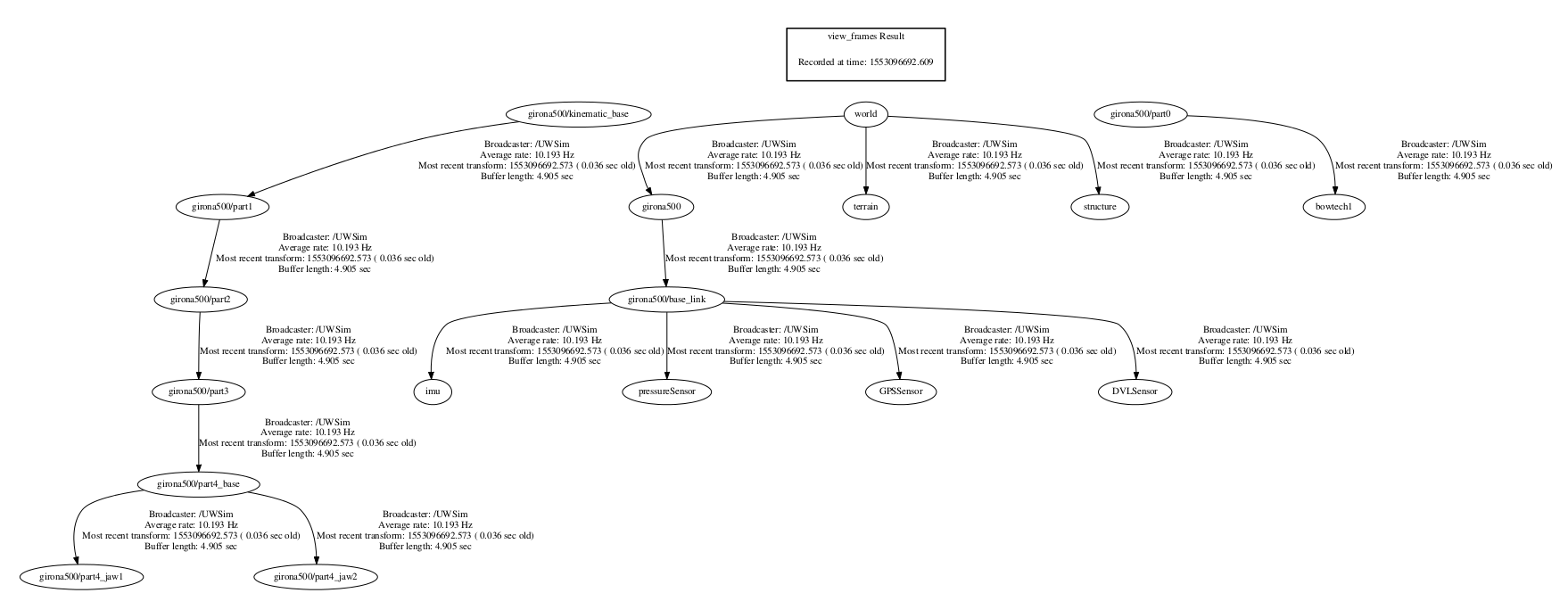
Adding my tf view_frames.
add a comment
