
Visualize the point cloud with Kinect v2 and Openni in Rviz is extremely slow and lag

Hello,
I use roslaunch openni2_launch openni2.launch to be the driver of kinect v2.
Then, I open the Rivz and choose PointCloud2 to visualize its point cloud, but it is very lag with 3~4 FPS.
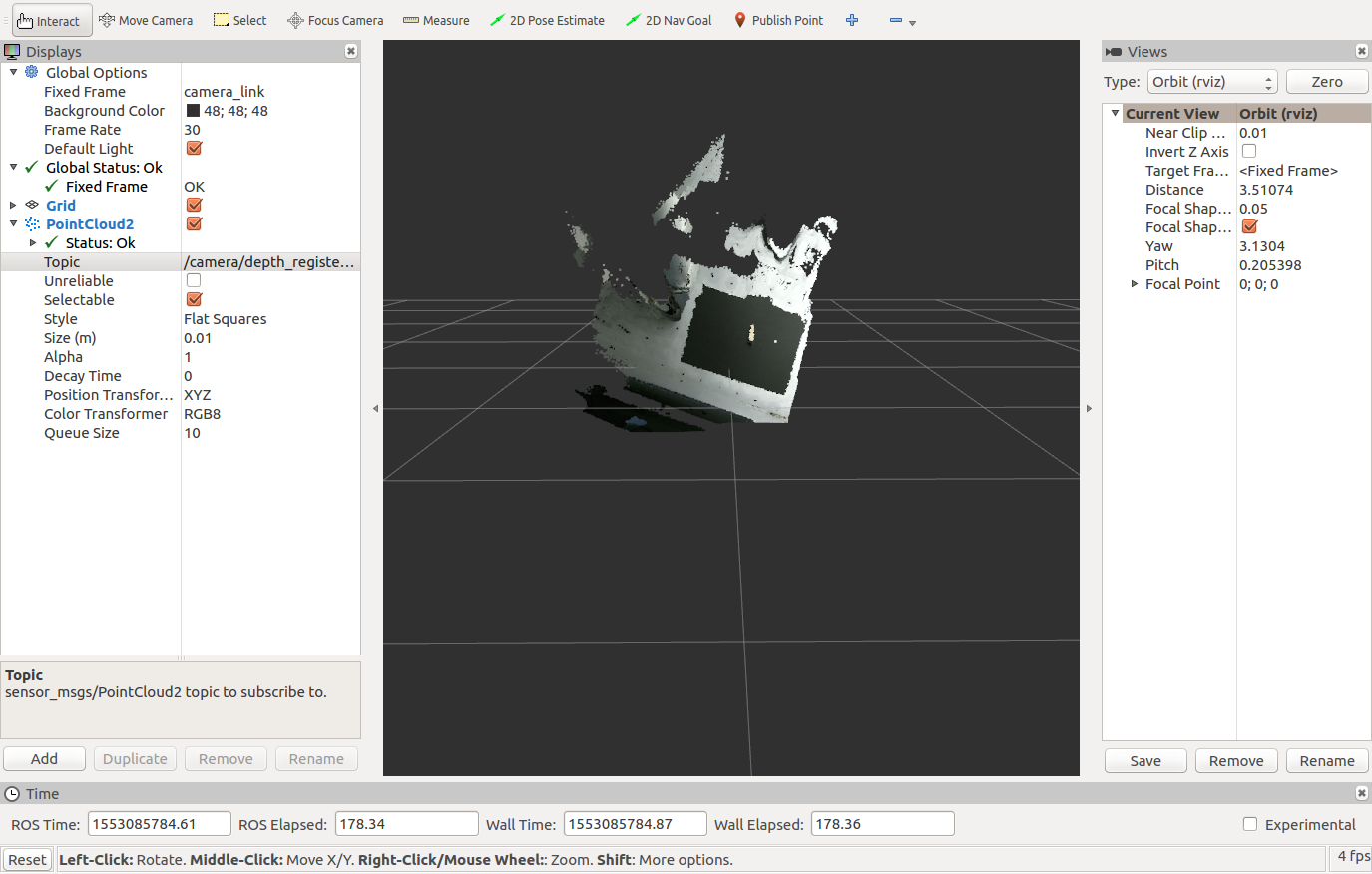
Anyone knows how to solve it? Please help me !
Thanks a lot!
add a comment
